�V�D�S�������͂�����ꍇ�̂P���R�x�n�̎��R�U��
7.1�@�U���̌���
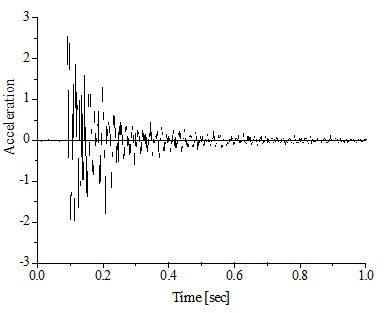
�@�h�A��߂��Ƃ��ɁC�h�o�^���h�Ƃ�����������̂����Ƃ�����D���̉��́C�J���Ƀh�A���ǂ����ƂԂ���C�h�A�S�̂ɐU�����N����C���̐U���ɂ�蔭�������C�̐U�����֘A���Ă���D�ǂ�@���Ă��@�������������C�₪�ď����邪�C������ǂ��U�����C���̐U���ɂ���Ă��̎��ӂ̋�C���U�����ĉ��Ƃ��ē`����Ă��邱�Ƃɂ��N���錻�ۂł���D�Ⴆ�C����`��̔ނ��������ƁC�}7-1�Ɏ����悤�ȃf�[�^���擾���邱�Ƃ��ł���D���̐}�́C���������ԁC�c���͂��̔ނɔ������Ă�������x�̒l�ŁC�}�Ɏ����悤��0.1�b������őŌ��ɂ��U���������������x���ϓ����C���X�ɑ傫�����������Ȃ��Ă��邱�Ƃ���U�����̂����ԂƋ��ɏ������Ȃ��Ă��邱�Ƃ�������D��ʂ̋@�B�C�@�B�\�����C�@�B�V�X�e�����Ō�����Ƃ���Ɠ��l�ȉ����x�g�`�ƂȂ�D����܂ł̃��f���ł͂��̂悤�ȁh�U��������ɏ������Ȃ錻�ہh�͌���Ă��炸�C��U�U�����n�߂�Ɓh�U���͎������郂�f���h�ƂȂ��Ă����D�����ɋN�����Ă��錻�ۂׂ邽�߂ɂ́C�����������\���ł��郂�f�����g�p����K�v������D
�@
�@
�@�}7-1�@�Ō���̐U�������x�̎���������
�@
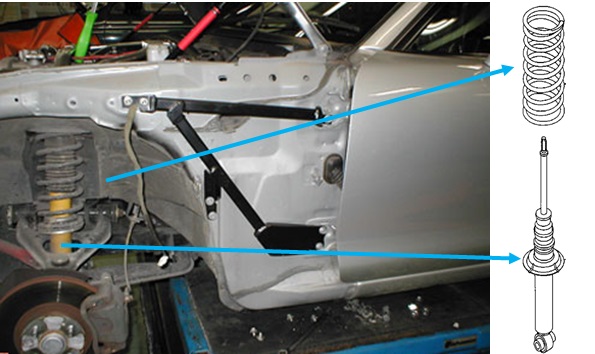
�@�@�B�V�X�e���ɂ͂�������������������g�ݍ��݁C�U��������������H�����鏊�Ɏ{����Ă���D�}7-2�́C�����Ԃ̑����C�T�X�y���V�������������Ă���C�˂Ń��f�����ł���R�C���o�l�ɉ����āC�U�����z�����邽�߂̃V���b�N�A�u�\�[�o�[�Ƃ����@�\���̗p����Ă���C���S�n�C����������ɑ傫���v�����Ă���D
�@
�@
�@�}7-2�@�����ԃT�X�y���V�������i�����j
�@
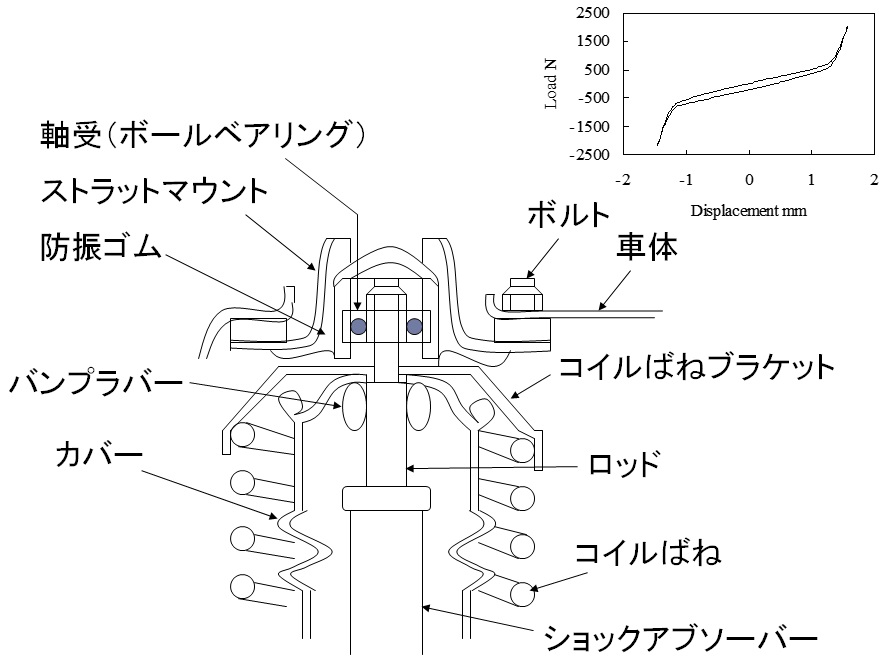
�T�X�y���V�������̏ڍׂ�}7-3�Ɏ����D�R�C���o�l�Ŏԑ̂��x����Ɠ����Ƀ_���p�[����p����\���ƂȂ��Ă���C�ԑ̂̓����ɑ��Ă˗͂Ƃ��̃_���p�[�ɂ���Ĕ�������͂������ɍ�p���邱�ƂɂȂ�D�����ŁC�E��̐}�͕ψʗʂɑ��Ĕ�������͂������Ă���C�����ʒu�i�ψʂ���ӂ�j��Hooke�̖@�������藧�悤�ɕψʂɑ��ė͂����`�I�ɕω����Ă���D�������C�傫�ȕψʗʂ̏ꍇ�}7-3�Ɏ����o���v���o�[�ɃV���b�N�A�u�\�[�o�[�̃V�����_�[�����Ԃ��邽�߂˒萔���}�ɑ��������悤�ȗ͂��������邱�ƂɂȂ�D�@�B�͊w�T�ł͂����������ڍׂȍ\���ɋN������p�����[�^�ݒ�͍s��Ȃ����C���ۂ̐v�E�J���ɍۂ��Ă͍l�������ׂ����ڂł���D
�@
�@
�@�}7-3�@�����ԃT�X�y���V�������ڍ�
�@
7.2�@����(damping, attenuation)���ۂ̕\��
�@�^����ό`�ɂ��C�����ɑ��݂���G�l���M�[���M�G�l���M�[�ϊ�����C�G�l���M�[���U��i�����j���Ă������ۂ������Ƃ����D��ʓI�Ɍ����͂͑��x�̊��Ƃ��čl����ꍇ���������̂悤�ȓT�^�I�ȃ��f�������݂���D
�@�@(a) ���̖��C�F���x$v$�̊��ŁC���x���Ⴂ�ꍇ�́C�S������$\propto v$�C���x�������ꍇ�́C�R��$\propto v^2$�D
�@�@(b) �ő̖��C�F���C�Q���̊Ԃ̃X���b�v��$s$�̊��ŁC�T�^�I�Ȃ��̂Ƃ��ẮC�Î~���C�W���Ɠ����C�W�������ꂼ����l�Ƃ��ă��f�����������́D
�@�@(c) �ő̓������C�F�c���x$\dot{\varepsilon}=\frac{d\varepsilon}{dt}$�i$\varepsilon$�c�j�̊��D�ό`���x�Ɉˑ��D
�@�@(d) �\�������F(b)�{�A�����i�{���g�E���x�b�g�C�ڐG�ʁj+(c)�ŁC�q�X�e���V�X�����iHysterisis damping)�ƌĂ��ꍇ������D
�U�����ł́C���ۂ̌��ۂ�������x���f�����ł��C���C�戵�����e�Ղł��邱�Ƃ���C�h�S�������́h�ɂ�錸���������l����ꍇ�������D
�S��������$f_D$(viscous damping force)
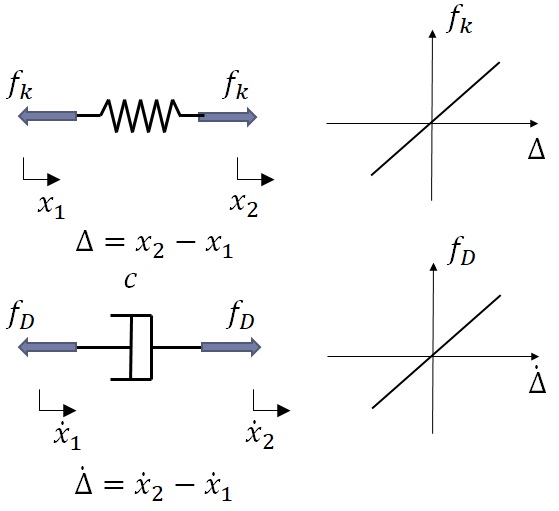
�@�S�����������肷��ƁC���̌����͂́C�_�b�V���|�b�g�i������j�̗��[�Ԃ̑��Α��x�i�����L���C���邢�́C�k�߂�鑬�x�j�ɔ�Ⴗ��͂���������Ɖ��肷��D���̎��̔��萔��S�������W��(viscous damping coefficient)�ƌĂԁDHooke�̖@���ɂ������$f_k$�ƕψʁi���j$\Delta$�̊W�Ɗ֘A�t���āC���[�Ԃ̑��Α��x$\dot{\Delta}$�Ɣ������錸����$f_D$�̊W��}7-4�Ɏ����DHooke�̖@���ł́C���̐}�̌X�����˒萔$k$�ƂȂ�̂ɑ��C�S�������̉���ł́C�S�������W��$c$���}�̌X���ƂȂ�D����$m$�����̏ꍇ�̃j���[�g���̑�2�@���i�^���̖@���j�́C�����������x�Ɏ��C���̎��̊����͂��c���Ɏ��ƁC�X��������$m$�Ƃ��铯�l�̒����W�ŕ\���ł��邱�Ƃ�������D
�@
�@
�@�}7-4�@Hooke�̖@���ɂ�����˗́C�S�������n�����肵���ꍇ�̌�����
�@
�yQUIZ 1�z�S�������W���̒P�ʂ������D�H
�S�����������肵���ꍇ�̌����͂� \begin{eqnarray*} f_D = c\dot{\Delta}=\dot{x}_2 - \dot{x}_1 \end{eqnarray*} ����āC�P�ʂ̊W�������� \begin{eqnarray*} �@[\text{N}] = [c\text{�̒P��}]\cdot[\text{m/s}] \end{eqnarray*} �ƂȂ�̂ŁC \begin{eqnarray*} �@[c\text{�̒P��}]=\frac{[\text{N}]}{[\text{m/s}]} = \frac{[\text{Ns}]}{[\text{m}]} \end{eqnarray*} �Ȃǂ̂悤�ɂȂ�D�����I�ȈӖ��Â�������ƁC�P�ʑ��x�ӂ�ɔ�������́C�Ƃ����P�ʁC�ƌ�����̂ŁC�R�ԂɎ������L�ڂ����C�Q�Ԗڂ̋L�ڂ̕��������I�Ӗ��t�����킩��\���ƂȂ�D[N}�͍����P�ʂł���̂ŁC�����͍X�ɕό`���邱�Ƃ��ł��C \begin{eqnarray*} �@[c\text{�̒P��}]=\frac{[\text{Ns}]}{[\text{m}]}=\frac{[\text{kg}\cdot\text{m/s}^2\cdot\text{s}]}{[\text{m}]}=\frac{[\text{kg}]}{[\text{s}]} \end{eqnarray*} �ƂȂ�C���ʂ̎��ԕω��C�h���ʑ��x�h�̂悤�ȒP�ʂƂȂ�C�����I�ȃC���[�W�������Ƃ�����Ȃ�D���̂��߁C�S�������W���̒P�ʂ́C�O�҂̂悤�Ȍ`�ŕ\������ꍇ���w��ǂł���D
7.3�@�������R�U���i1���R�x�S�������n�j
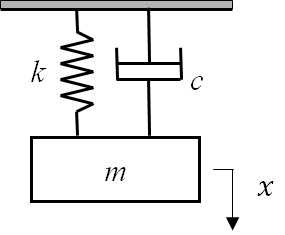
�ȏ���C����@�B�V�X�e�����C�S�̂̎��ʂ�$m$�ŁC������˒萔$k$�̂˂ƔS�������W��$c$�̃_�V���|�b�g�̕���n�Ŏx������Ă���n�ƍl���C���̉^���ɂ��čl�@����D
�@�}7-5�Ɏ����ÓI�Ȓލ��ʒu����̕ψʂ�$x$�Ƃ���D�˂̎��R������̂��̐ÓI�Ȓލ��ʒu�܂ł̂˂̐L�т�$\delta_{st}$�Ƃ���ƁC$mg=k\delta_{st}$�̊W����C�d�͂���菜�����`��Free-body Diagram��`���Ɛ}7-6�̂悤�ɂȂ�D
�@
�@
�@�}7-5�@�P���R�x�S�������n
�@
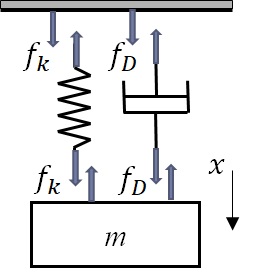
�}�Ɏ����˗�$f_k$�́CHooke�̖@������ \begin{eqnarray*} f_k = k\left(x-0\right) = kx \end{eqnarray*} ������$f_D$�́C \begin{eqnarray*} f_D = c\left(\dot{x}-0\right) = c\dot{x} \end{eqnarray*} �ƂȂ�̂ŁCNewton�̑�Q�@�����玟����D \begin{eqnarray*} m\ddot{x} = - f_k - f_D = -kx -c\dot{x} \end{eqnarray*} �����C1���R�x�S�������n�̉^���������͎����ƂȂ�D \begin{eqnarray*} m\ddot{x} + c\dot{x} + kx = 0 \end{eqnarray*}
�@
�@
�@�}7-6�@�P���R�x�S�������n�ɑ���Free-body Diagram
�@
���̒萔�W���̐��`������������ɑ����ʉ������߁C���̌n�̉������v�Z����D���ӂ�$m$�Ŋ���� \begin{eqnarray*} \ddot{x} + \frac{c}{m}\dot{x} + \frac{k}{m}x = 0 \end{eqnarray*} ��������$\lambda$�Ƃ��C$X$�𖢒����Ƃ��āC$x=Xe^{\lambda t}$�Ƃ����C�㎮�ɑ������Ǝ��̓�����������D \begin{eqnarray*} \lambda^2 + \frac{c}{m}\lambda + \frac{k}{m} = 0 \end{eqnarray*} �����C�Q���������ł���̂łQ�̉�����܂�C�����$\lambda_1$�C$\lambda_2$�Ƃ��āC���ό`���Ă݂�D \begin{eqnarray*} \left.\begin{array}{l} \lambda_1 \\ \lambda_2 \end{array} \right\} &=&\frac{1}{2}\left(-\frac{k}{m} \pm \sqrt{\left(\frac{c}{m}\right)^2-4\frac{k}{m}} \right) = -\frac{c}{2m}pm\sqrt{\left(\frac{c}{m}\right)^2-\frac{k}{m}} \\ &=& \sqrt{\frac{k}{m}}\left(-\frac{c}{2\sqrt{mk}}\pm\sqrt{\left(\frac{c}{2\sqrt{mk}}\right)^2-1}\right) = p\left(-\zeta\pm\sqrt{\zeta^2-1}\right) \end{eqnarray*} �����C�s�����n�̌ŗL�p�U����$p=\sqrt{\frac{k}{m}}$��$\zeta=\frac{c}{2\sqrt{mk}}$�ŕ\�킳��閳��������p���ĉ���\�����Ƃ��ł��邱�Ƃ��킩��D��҂́C�������ł���C�S�������W�������q�ɂ��邱�Ƃ���C�h������h�ƌĂ�C���̌n�̐U�������̂����̌��������ɊW����h�p�����[�^�h�ł���D�܂��C�����$c_c=2\sqrt{mk}$�́C�P�ʂ͔S�������W�������ł���C����������ω������鋫�E�̂悤�ȓ����������Ƃ���h�ՊE�����W���h�ƌĂ��D�����̒l��p���ĉ^����������\�킷�� \begin{eqnarray*} \ddot{x} + 2\zeta p\dot{x} + p^2x = 0 \end{eqnarray*} �܂��C������������ \begin{eqnarray*} \lambda^2 + 2\zeta p\lambda + p^2 = 0 \end{eqnarray*} �̂悤�ɕ\�킷���Ƃł���D
�@�]���āC����W����$A$�C$B$�Ƃ��āC��ʉ���\�킷�Ǝ����ƂȂ�D \begin{eqnarray*} x &=& Ae^{\lambda_1t} + Be^{\lambda_2t} = Ae^{p\left(-\zeta+\sqrt{\zeta^2-1}\right)t} + Be^{p\left(-\zeta-\sqrt{\zeta^2-1}\right)t} \\ &=& e^{-\zeta pt}\left(Ae^{p\sqrt{\zeta^2-1}t} + Be^{-p\sqrt{\zeta^2-1}t}\right) \end{eqnarray*} �����ŁC$\zeta=c/2\sqrt{mk}$�́C$m$�C$c$�C$k$�̒l�̑g�����ɂ��C�l�X�Ȓl����蓾��̂ŁC$\sqrt{\zeta^2-1}$�������ƂȂ�̂��C�����ƂȂ�̂��ɂ���āC���̐������قȂ�ƍl������D�����ŏ������������ĉ��̐����ׂ邱�Ƃɂ���D
1) $\zeta>1$�̂Ƃ�
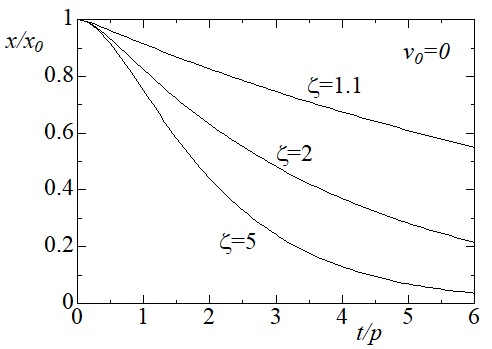
�`�͏�L�̂܂܂̕\���ƂȂ�C \begin{eqnarray*} x = Ae^{p\left(-\zeta+\sqrt{\zeta^2-1}\right)t} + Be^{p\left(-\zeta-\sqrt{\zeta^2-1}\right)t} \end{eqnarray*} �ł���C$\zeta>\sqrt{\zeta^2-1}$�Ȃ̂ŁC��P���C��Q�����C�w�����͕��ƂȂ�C���Ԃɑ��ĒP���Ɍ������C��Ɏ������邱�Ƃ�������D�����C���̏����̎��́C���̂͐U�������h�������h�^���ƂȂ�D����͌n�̃p�����[�^�̒��̌����������傫�����Ƃ���N���錋�ʂȂ̂ŁC�h�ߌ����h�ƌĂ��D���̏ꍇ�̌n�̉��������������ɑ��Ē�߂邱�Ƃɂ���D$t=0$�ɂ����āC$x=x_0$�C$\dot{x}=v_0$�Ƃ���ƁC���x�� \begin{eqnarray*} \dot{x} = p\left(-\zeta+\sqrt{\zeta^2-1}\right)Ae^{p\left(-\zeta+\sqrt{\zeta^2-1}\right)t} + p\left(-\zeta-\sqrt{\zeta^2-1}\right)Be^{p\left(-\zeta-\sqrt{\zeta^2-1}\right)t} \end{eqnarray*} �ƂȂ邱�Ƃ���C���̊W����܂�D \begin{eqnarray*} \left.\begin{array}{l} x_0 = A + B \\ v_0 = p\left(-\zeta+\sqrt{\zeta^2-1}\right)A + p\left(-\zeta-\sqrt{\zeta^2-1}\right)B \end{array}\right\} \end{eqnarray*} ����W��A�CB�Ɋւ���A���ꎟ�������Ƃ��ĉ����Ǝ�����D \begin{eqnarray*} \left.\begin{array}{l} A = \frac{1}{2}\left\{x_0 + \frac{1}{\zeta^2-1}\left(\frac{v_0}{p}+x_0\zeta\right) \right\}\\ B = \frac{1}{2}\left\{x_0 - \frac{1}{\zeta^2-1}\left(\frac{v_0}{p}+x_0\zeta\right) \right\} \end{array}\right\} \end{eqnarray*} �w�����̌`����C���̂悤�ɕό`���邱�Ƃ��ł���D \begin{eqnarray*} x &=& e^{-\zeta pt}\left\{\left(A+B\right)\frac{e^{p\sqrt{\zeta^2-1}t} + e^{-p\sqrt{\zeta^2-1}t}}{2} +\left(A-B\right)\frac{e^{p\sqrt{\zeta^2-1}t} - e^{-p\sqrt{\zeta^2-1}t}}{2} \right\}\\ &=& e^{-\zeta pt}\left\{\left(A+B\right)\cosh p\sqrt{\zeta^2-1}t +\left(A-B\right)\sinh p\sqrt{\zeta^2-1}t\right\}\\ &=& e^{-\zeta pt}\left\{x_0\cosh p\sqrt{\zeta^2-1}t +\frac{v_0/p+x_0\zeta}{\sqrt{\zeta^2-1}}\sinh p\sqrt{\zeta^2-1}t\right\} \end{eqnarray*} $v_0=0$�Ƃ����ꍇ�̂��̌n�̉�����}������Ɛ}7-7�̂悤�ɂȂ�D
�@
�@
�@�}7-7�@�ߌ����n�̎���������
�@
2) $\zeta=1$�̂Ƃ�
$\lambda_1=\lambda_2=-p$�C�����C�d���ƂȂ�̂ň�ʉ��͎��̂悤�ɂȂ�D \begin{eqnarray*} x=\left(A+Bt\right)e^{-pt} \end{eqnarray*} ���Ԕ������đ��x���������߂�ƁC \begin{eqnarray*} \dot{x}=e^{-pt}\left\{B-p\left(A+Bt\right)\right\} \end{eqnarray*} �ƂȂ�̂ŁC����������$t=0$�ɂ����āC$x=x_0$�C$\dot{x}=v_0$�Ƃ���ƁC \begin{eqnarray*} && \left.\begin{array}{l} x_0=A\\ v_0=B-pA \end{array}\right\} \\ && \therefore \left. \begin{array}{l} A=x_ 0\\ B=v_0 + px_0 \end{array}\right\} \end{eqnarray*} ����āC���̏ꍇ�̎����������͎��̂悤�ɂȂ�D \begin{eqnarray*} x=\left\{x_0+\left(v_0 + px_0\right)t\right\}e^{-pt} \end{eqnarray*}
3) $\zeta<1$�̂Ƃ�
�@$\zeta^2-1<0$�ƂȂ�̂ŁC�����������̂悤�ɕό`����D \begin{eqnarray*} \left.\begin{array}{l} \lambda_1 \\ \lambda_2 \end{array} \right\} = -p\left(\zeta\pm i\sqrt{1-\zeta^2}\right) \end{eqnarray*} �]���āC��ʉ��͎��̂悤�ɂȂ�D \begin{eqnarray*} x &=& e^{-\zeta pt}\left(Ae^{ip\sqrt{1-\zeta^2}t} + Be^{-ip\sqrt{1-\zeta^2}t}\right)\\ &=& e^{-\zeta pt}\left\{\left(A+B\right)\cos p\sqrt{1-\zeta^2}t + i\left(A-B\right)\sin p\sqrt{1-\zeta^2}t\right\} \\ &=& e^{-\zeta pt}\left\{C\cos p\sqrt{1-\zeta^2}t + D\sin p\sqrt{1-\zeta^2}t\right\} \end{eqnarray*} C�CD�͖���W���ł���C���������ɂ���܂�D���Ԕ�������� \begin{eqnarray*} \dot{x} = e^{-\zeta pt}\left\{-\zeta p\left(C\cos p\sqrt{1-\zeta^2}t + D\sin p\sqrt{1-\zeta^2}t\right) + p\sqrt{1-\zeta^2}\left(-C\sin p\sqrt{1-\zeta^2}t + D\cos p\sqrt{1-\zeta^2}t\right) \right\} \end{eqnarray*} �ƂȂ�̂ŁC$t=0$�ɂ����āC$x=x_0$�C$\dot{x}=v_0$�Ƃ���ƁC \begin{eqnarray*} && \left.\begin{array}{l} x_0 = C \\ v_0 =-\zeta pC + p\sqrt{1-\zeta^2}D \end{array}\right\} \\ && \therefore \left. \begin{array}{l} C = x_0 \\ D = \frac{v_0+\zeta px_0}{p\sqrt{1-\zeta^2}} \end{array}\right\} \end{eqnarray*} �]���āC���̏ꍇ�̌n�̉����͎����ƂȂ�D \begin{eqnarray*} x &=& e^{-\zeta pt}\left(x_0\cos p\sqrt{1-\zeta^2}t + \frac{v_0+\zeta px_0}{p\sqrt{1-\zeta^2}}\sin p\sqrt{1-\zeta^2}t\right)\\ &=& \sqrt{x_0^2+\frac{\left(v_0/p+\zeta x_0\right)^2}{1-\zeta^2}}\cos\left(p\sqrt{1-\zeta^2}t-\varphi\right) \\ &\quad& \varphi=\tan^{-1}\frac{v_0/p+\zeta x_0}{x_0\sqrt{1-\zeta^2}} \end{eqnarray*} ���̏ꍇ�C$p$�ɑ��āC$p\sqrt{1-\zeta^2}$�̊p�U����������C���҂���ʂ��邽�߂ɁC�O�҂��h�s�����ŗL�p�U�����h�C��҂��h�����ŗL�p�U�����h�ƌĂԏꍇ������D
�@
�@
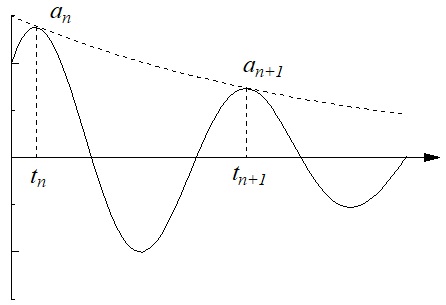
�@�}7-8�@�������R�U���ɂ�����U���ω�
�@
�@�����ŗL�p�U����$p_d=p\sqrt{1-\zeta^2}$�Œ�܂�������ɕω�����U����}������Ɛ}7-8�Ɏ����悤�ɒ�`���邱�Ƃ��ł���D�����C$n$�Ԗڂ̒��_�ɂ�����U��$a_n$������$t_n$�Ō����Ƃ���� \begin{eqnarray*} a_n = X_0e^{-\zeta pt_n} \end{eqnarray*} �ł���C$(n+1)$�Ԗڂ����l�� \begin{eqnarray*} a_{n+1} = X_0e^{-\zeta pt_{n+1}} \end{eqnarray*} �ƕ\���ł���̂ŁC���̔�����Ǝ����̂悤�ɂȂ�D \begin{eqnarray*} \frac{a_n}{a_{n+1}} = \frac{e^{-\zeta pt_n}}{e^{-\zeta pt_{n+1}}} = e^{\zeta p(t_{n+1}-t_n)} \end{eqnarray*} �����ŁC$t_{n+1}-t_n$�́C���̌n�̌ŗL����$T_d$�ƍl���ėǂ��̂ŁC���̂悤�ȊW�ƂȂ�D \begin{eqnarray*} t_{n+1}-t_n) = T_d = \frac{2\pi}{p_d}=\frac{2\pi}{p\sqrt{1-\zeta^2}} \end{eqnarray*} ���̊W���g���� \begin{eqnarray*} \frac{a_n}{a_{n+1}} = e^{\frac{2\pi\zeta}{\sqrt{1-\zeta^2}}} \end{eqnarray*} ���R�ΐ������Ǝ��̂悤�ȑΐ�������$\delta$���`���邱�Ƃ��ł���D \begin{eqnarray*} \delta= \ln\frac{a_n}{a_{n+1}} = \frac{2\pi\zeta}{\sqrt{1-\zeta^2}} \end{eqnarray*} �U�����u�̊W�Ƃ��ẮC \begin{eqnarray*} && \frac{a_n}{a_{n+1}} = e^{\delta} \\ && \therefore a_{n+1} = a_ne^{-\delta} \end{eqnarray*} �܂��C$\zeta \ll 1$�̂Ƃ��C \begin{eqnarray*} \delta= \frac{2\pi\zeta}{\sqrt{1-\zeta^2}} \fallingdotseq 2\pi\zeta \end{eqnarray*} �Ƃ��邱�Ƃ�����D�X�ɁC$\delta$���������Ƃ��C \begin{eqnarray*} && \frac{a_{n+1}}{a_n} = e^{-\delta} = 1 - \delta + \frac{1}{2!}(-\delta)^2 + \frac{1}{3!}(-\delta)^3+\ldots \fallingdotseq 1 - \delta \\ && \therefore a_{n+1} = \left(1-\delta\right) a_n \end{eqnarray*} ����āC$\Delta a_n = a_n-a_{n+1}$�Ƃ����� \begin{eqnarray*} && \Delta a_n = \delta a_n \\ && \therefore \frac{\Delta a_n}{a_n} = \delta \fallingdotseq 2\pi\zeta \end{eqnarray*} �����C \begin{eqnarray*} \zeta =\frac{1}{2\pi}\frac{\Delta a_n}{a_n} \end{eqnarray*} ����C$\zeta$���߂邱�Ƃ����Ƃ�����D
�@����܂Ŏ����I�ɋ��߂�ꂽ�ΐ��������ƌ�����̗��\7-1�Ɏ����D���̂悤�Ɉ�ʂ̋@�B�\�����̌����͏������C�w��ǂ̏ꍇ���U���n�ƂȂ�D
�\7-1 �ΐ��������ƌ�����̗�
�\����
$\delta$
$\zeta$
�^�[�r���u���[�h
$0.03$
$4.8\times10^{-3}$
�R�C���o�l
$0.03\sim0.07$
$4.8\times10^{-3}\sim1.1\times10^{-2}$
��
$0.1$
$1.6\times10^{-2}$
����
$0.3$
$4.8\times10^{-2}$
7.4 ���K
(1) �P���R�x�n$m$�C$k$�Ȃ�U���n���Q����D������A�n�CB�n�ƌĂԂ��Ƃɂ���DA�n��$m=184$t�C�����̂Ȃ��Ƃ��̌ŗL�U������$f_n=4.7$Hz�CB�n�́C$m'=1184$t�C�����̂Ȃ��Ƃ��̌ŗL�U����$f_n=2.3$Hz�ł���Ƃ����DA�CB�n�ɓ����_���p�[��t�����Ƃ��CA�n�Ō����䂪18%�Ƃ���ƁCB�n�ł͉�%�ƂȂ邩�D
(2) �}7-5�Ɏ����n�ɂ����āC����$m=5$kg�C�˒萔$k=5\times10^3$N/m�C�S�������W��$c=24$Ns/m�Ƃ��Ė{�n�̌�����C�ΐ��������C�ׂ荇���U���̔�����߂�D