�X�D�����̂Ȃ��ꍇ�̂P���R�x�n�̋����U��
9.1�@�U�����ۂ̎�ށE����
�@����܂ŁC�@�B�V�X�e���ɔ�������U�����P���R�x�n�Ń��f�������āC�h���R�U���h�ɂ��Ē��ׂĂ����D���̐U���́C�ŏ��ɏ����ψʁC���邢�́C�������x���^����ꂽ��ɋN����U���ł���C�U�����ɊO������͂���p���Ă���킯�ł͂Ȃ��D�������Ȃ���C�U���H�w�n���h�u�b�N�i�{�������s�j�ɂ́C
�@�E���R�U�� (free vibration)�F��U����菜������ɋN����U��
�ƋL�ڂ���Ă���C���ۖ��ł́C�U����U������h��U�h���U������������ȑO�ɍ�p���Ă����ƍl����̂���ʓI�ł���Ǝv����D�܂�C�h���R�U���h����������ȑO�ɉ��炩�̗͂���p���Ă���C���̌��ʂƂ��ď��������ƂȂ鏉���ψʂ⏉�����x���^�����āh���R�U���h����������Ƃ����̂����ۂɋN���蓾�錻�ۂł���D�@�B�V�X�e�����^�]���邽�߂ɂ́C���炩�̓��͂��K�v�ł���D�N�����ɉ������͂́C���ʂƂ��āh���R�U���h��U������\��������D�܂��C�^�]��Ԃ��p�����邽�߂ɂ́C�O������͂�����������K�v�����邪�C���̗͂͋@�B�V�X�e���ɉ^�������炩�̕ό`��U������\��������C����͐U�����ۂƂ��Č����D�^�]�J�n���C���邢�́C�^�]���ɐU�������������ꍇ�́C�P�Ȃ�h���R�U���h�ł͂Ȃ��C�^�]�Ɋ֘A���鉽�炩�́h��U�́h����p�������ʂƂ��ċN����U���Ƒ�����ׂ��ł���C����͎��R�ɐU�����Ă���h���R�U���h�݂̂ł͌��ۂ�����ł��Ȃ��D�@�B�V�X�e���̉^���́C�J��Ԃ����삪�����C�������������Ƃ���C�����I�ȓ��͂��U�͂Ƃ���̂���ł���D�����ł́C�U���H�w�n���h�u�b�N�ɁC
�@�E�����U��(forced vibration) : �����I�ȗ�U�ɂ���Ĕ���������U��
�ƋL�ڂ���Ă���U�����ۂׂ邱�Ƃɂ���D���̐U�����ۂ́C�h���R�U���h�Ɍ����h�ߓn�I�ȐU���h�ɑΔ䂵�āC�h���U���h�Ƒ������邪�C�h���R�U���h�Ō��������f�������ۂׂ邱�Ƃ��ł��C�@�B�V�X�e���̐v�w�j��^�]�w�j�̊�b�ƂȂ���̂ł���D���n���h�u�b�N�ɂ́h���R�U���h�C�h�����U���h�̑��ɁC
�@�E�i�@�B�j�U��(vibration) : �@�B�n�̉^�����͕ψʂ�\���ʂ̑傫�����A���镽�ϒl���͊�l�����傫����ԂƏ�������Ԃ����݂ɌJ��Ԃ����ԓI�ȕω��D
�@�E�����U��(periodic vibration) : �Ɨ��ϐ���������l�������邲�ƂɁA�����l���J��Ԃ��悤�Ȋ��ɂ���Ď������U���D
�@�@$\star$���Ԃ̊��Ƃ��Ď�����������$y$�́A���̂悤�ɕ\�����D
�@\begin{eqnarray*}
�@y=f(t)=f(t+nT)
�@\end{eqnarray*}
�@�����ŁA$n$�G�����C$T$�F�萔�C$t$: �Ɨ��ϐ��D
�@�E�s�K���U��(random vibration) : �C�ӂ̎����ɂ�����傫�������m�ɗ\�m�ł��Ȃ��U���D
�@�E���U��(steady-state vibration) : �p���I�Ȏ����U���D
�@�E�ߓx�U��(transient vibration) : ����ԂłȂ��U���D
�Ȃǂ��L�ڂ���Ă���D�����́C�����ɋN����l�X�ȁh�U�����ہh�̓�����\���Ă��邪�C���ۂ̐U���������̂ǂꂩ�ɕ��ނ����킯�ł͂Ȃ��C�N�����Ă���U���́C�����̓����̂�������L���Ă���ƍl����ׂ��ł���D
9.2�@�����U��
�@�}9-1�Ɏ����悤�ɁC����$m$�C�˒萔$k$�̕s�����̂P���R�x�n��$f(t)=P\cos\omega t$�̎����I�ȗ�U�͂���p���Ă���n���l����D
�@
�@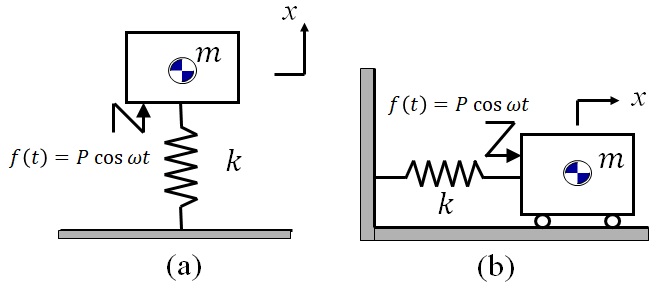
�@�}9-1�@�P���R�x�s�����n�̋����U��
�@
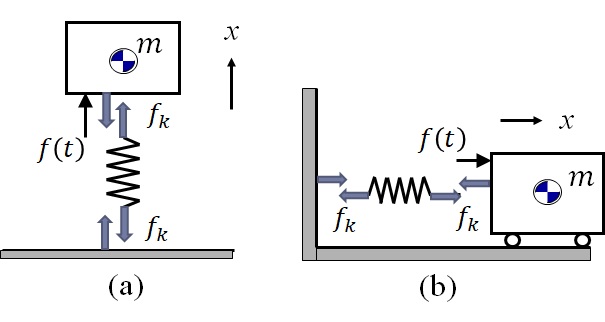
���̌n�ɑ���Free-body Diagram�͐}8-2�̂悤�ɂȂ�D�}�Ɏ����͂�
\begin{eqnarray*}
&& f_k = kx \\
&& f(t)=P\cos\omega t
\end{eqnarray*}
�ł���̂ŁC�^���������͎��̂悤�ɂȂ�D
\begin{eqnarray*}
m\ddot{x} = f(t) - f_k = P\cos\omega t - kx
\end{eqnarray*}
\begin{eqnarray*}
\therefore m\ddot{x} + kx = P\cos\omega t
\end{eqnarray*}
���ӂ�$m$�Ŋ����
\begin{eqnarray*}
\ddot{x} + \frac{k}{m}x = \frac{P}{m}\cos\omega t
\end{eqnarray*}
���̕������́C���̏�����������ƂȂ�̂ŁC���́C�E�ӂ��Ƃ����ē����铯�����ƉE�ӂ𐬂藧��������i�����j�Ƃ̘a�ƂȂ�D
�@
�@
�@�}9-2�@�P���R�x�s�����n�����U���ɑ���Free-body Diagram
�@
�@������$x_h$�͂��łɓ��o���Ă���C���̌n�̌ŗL�p�U����$p=\sqrt{\frac{k}{m}}$�Ɩ���W��$a_1$�C$b_1$��p���Ď��̂悤�ɂȂ�D
\begin{eqnarray*}
x_h = a_1\cos pt + b_1\sin pt
\end{eqnarray*}
�������$x_s$�́C���ӂɂ����ĕK�v�Ȕ������{�����ۂɌ������`�����肷��悢�̂ŁC��������$\cos\omega t$�������̂́C$\cos\omega t$��������$\sin\omega t$�Ȃ̂ŁC����W����$a_2$�C$b_2$�Ƃ��āC���̂悤�ɉ��肷�邱�Ƃ��ł���D
\begin{eqnarray*}
x_s = a_2\cos\omega t + b_2\sin\omega t
\end{eqnarray*}
����$x_s$�ŕ\�����^��������
\begin{eqnarray*}
\ddot{x}_s + p^2x_s = \frac{P}{m}\cos\omega t
\end{eqnarray*}
�ɑ������Ǝ�����D
\begin{eqnarray*}
\left(p^2a_2-a_2\omega^2 -\frac{P}{m}\right)\cos\omega t + b_2\sin\omega t = 0
\end{eqnarray*}
����āC����W���͎��̂悤�ɂȂ�D
\begin{eqnarray*}
&& a_2=\frac{P/m}{p^2-\omega^2} \\
&& b_2 =0
\end{eqnarray*}
�����ŁC
\begin{eqnarray*}
\frac{P}{m}=\frac{P}{m}=\frac{P}{k}\frac{k}{m}=\frac{P}{k}p^2
\end{eqnarray*}
���C$\delta_{st}=P/k$�Ƃ����ƁC�����͎��̂悤�ɂȂ�D
\begin{eqnarray*}
x_s = \frac{\delta_{st}p^2}{p^2-\omega^2}\cos\omega t = \frac{\delta_{st}}{1-\left(\frac{\omega}{p}\right)^2}\cos\omega t
\end{eqnarray*}
�]���āC���̌n�̉����͎����ƂȂ�D
\begin{eqnarray*}
x=x_h + x_s = a_1\cos pt+ b_1\sin pt + \frac{\delta_{st}}{1-\left(\frac{\omega}{p}\right)^2}\cos\omega t
\end{eqnarray*}
���Ԕ������đ��x�����߂�Ǝ����ƂȂ�D
\begin{eqnarray*}
\dot{x} = p\left(-a_1\sin pt+ b_1\cos pt\right) - \frac{\omega\delta_{st}}{1-\left(\frac{\omega}{p}\right)^2}\sin\omega t
\end{eqnarray*}
����āC����������$t=0$�ɂ����āC$x=x_0$�C$\dot{x}=v_0$�Ƃ���Ǝ�����D
\begin{eqnarray*}
&& x_0 = a_1 + \frac{\delta_{st}}{1-\left(\frac{\omega}{p}\right)^2}\\
&& v_0 = pb_1
\end{eqnarray*}
�̂ɁC
\begin{eqnarray*}
\left.\begin{array}{l}
a_1 = x_0 -\frac{\delta_{st}}{1-\left(\frac{\omega}{p}\right)^2}\\
b_1 = \frac{v_0}{p}
\end{array}\right\}
\end{eqnarray*}
�����C���̌n�̉����͎����ƂȂ�D
\begin{eqnarray*}
x = \left\{x_0 -\frac{\delta_{st}}{1-\left(\frac{\omega}{p}\right)^2}\right\}\cos pt + \frac{v_0}{p}\sin pt + \frac{\delta_{st}}{1-\left(\frac{\omega}{p}\right)^2}\cos\omega t
\end{eqnarray*}
���̎�����C���̌n�̉����́C�n�̌ŗL�p�U����$p=\frac{k}{m}$�ŐU�����鎩�R�U�������ɑΉ����鍀�Ɨ�U�͂̊p���g���i�p�U�����j$\omega$�ʼn������鍀�̘a�ŕ\������邱�Ƃ�������D�����ŁC
\begin{eqnarray*}
x_0 =\frac{\delta_{st}}{1-\left(\frac{\omega}{p}\right)^2}\text{, }v_0 = 0
\end{eqnarray*}
�̂Ƃ��C
\begin{eqnarray*}
x = \frac{\delta_{st}}{1-\left(\frac{\omega}{p}\right)^2}\cos\omega t
\end{eqnarray*}
�ƂȂ�D���̉��́C��U�͂̊p�U�����ʼn�������ꍇ�������Ă���C���̎��̉����́C�����U�������ƌĂ��D�����C�n�̋����U�������ł́C���R�U�������̍����܂܂Ȃ��C��U�͂ɂ�苭���I�ɔ����������鉞���݂̂��l����D
�@����C$\omega\approx p$���l���邽�߂ɁC
\begin{eqnarray*}
&& p-\omega = 2\Delta \\
&& p+\omega \approx 2\omega
\end{eqnarray*}
�Ƃ����
\begin{eqnarray*}
&& \cos pt = \cos\left(\frac{p+\omega+p-\omega}{2}\right)t = \cos\omega t\cos\Delta t - \sin\omega t\sin\Delta t \\
&& \sin pt = \sin\left(\frac{p+\omega+p-\omega}{2}\right)t = \sin\omega t\cos\Delta t + \cos\omega t\sin\Delta t
\end{eqnarray*}
�܂��C
\begin{eqnarray*}
&& \frac{1}{1-\left(\frac{\omega}{p}\right)^2} = \frac{p^2}{(p^2-\omega^2}\approx\frac{\omega^2}{\left(p-\omega\right)\left(p+\omega\right)} = \frac{\omega^2}{2\Delta\cdot2\omega}=\frac{\omega}{4\Delta} \\
&& \cos\omega t\approx \cos pt = \cos\omega t\cos\Delta t - \sin\omega t\sin\Delta t
\end{eqnarray*}
�ƂȂ�̂ŁC�����͎��̂悤�ɂȂ�D
\begin{eqnarray*}
x &=& \left\{x_0 -\frac{\omega\delta_{st}}{4\Delta}\right\}\left(\cos\omega t\cos\Delta t - \sin\omega t\sin\Delta t\right) + \frac{v_0}{p}\left(\sin\omega t\cos\Delta t + \cos\omega t\sin\Delta t \right) + \frac{\omega\delta_{st}}{4\Delta}\left(\cos\omega t\cos\Delta t - \sin\omega t\sin\Delta t\right) \\
&=& \left\{\left(x_0 -\frac{\omega\delta_{st}}{4\Delta}\right)\cos\Delta t + \frac{v_0}{p}\sin\Delta t + \frac{\omega\delta_{st}}{4\Delta}\cos\Delta t\right\}\cos\omega t
+ \left\{\left(-x_0 + \frac{\omega\delta_{st}}{4\Delta}\right)\sin\Delta t + \frac{v_0}{p}\cos\Delta t + \frac{\omega\delta_{st}}{4\Delta}\sin\Delta t\right\}\sin\omega t
\end{eqnarray*}
����āC$\Delta \ll 1$�̂Ƃ��C
\begin{eqnarray*}
x &\approx& \left(x_0 + \frac{v_0}{p}\Delta t\right)\cos\omega t + \left\{-\left(x_0 + \frac{\omega\delta_{st}}{2\Delta}\right)\Delta t + \frac{v_0}{p}\right\}\sin\omega t \\
&=&\left(x_0 + \frac{v_0}{p}\Delta t\right)\cos\omega t + \left(-x_0 + \frac{v_0}{p} + \frac{\omega\delta_{st}}{2}t\right)\sin\omega t
\end{eqnarray*}
����āC��R��
\begin{eqnarray*}
\frac{\omega\delta_{st}}{2}t\sin\omega t
\end{eqnarray*}
�́C$\omega\approx p$�̂Ƃ��C�U�������ԂƋ��ɑ��傷�邱�Ƃ������Ă���C���ԓI�ϓ��͗�U�͂�$\cos\omega t$�ł͂Ȃ��C$\sin\omega t$�ŕϓ����邱�Ƃ�������D�܂�C$\omega$�̒l�����X�ɕω������C$p$�̒l�ɋ߂Â��Ă����ƁC���̐U�������ԂƋ��ɑ��傷�邱�ƂɂȂ邪�C�ŏ��]���U���ł��������̂������U���ɕω�����Ƃ������Ƃ��N����D�����U������
\begin{eqnarray*}
x = \frac{\delta_{st}}{1-\left(\frac{\omega}{p}\right)^2}\cos\omega t
\end{eqnarray*}
�̉����U��$A$��
\begin{eqnarray*}
A = \frac{\delta_{st}}{1-\left(\frac{\omega}{p}\right)^2}
\end{eqnarray*}
�ł���C���̉����U��$A$��"��U�p���g��$\omega$�̊�"�ƌ��Ȃ����Ƃ��ł���D�����ɖ��������p���g��$\frac{\omega}{p}$�C�c���ɖ��������U��$\frac{A}{\delta_{st}}$�����C�O���t�ɕ\�킷�ƁC�}9-3�̂悤�ɂȂ�D
�@
�@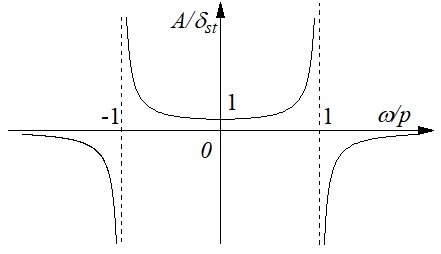
�@�}9-3�@�P���R�x�s�����n�̎��g�������Ȑ�
�@
�@�}���疾�炩�Ȃ悤��$\omega$�̐�Βl��납�珙�X�ɑ傫�����Ă����ƁC�U���U���͎���ɑ傫���Ȃ�C$\frac{\omega}{p}=\pm1$�̂Ƃ��C�U���U���͍ő�i���̏ꍇ�͖�����j�ƂȂ�D���̎��̏�Ԃ��h���U(resonance)�h���邢�́C���U��ԂƂ����D���̒l���z����ƁC�U���U���̓}�C�i�X�������ƂȂ�C�X�Ɏ��g����傫������ƕ��������̐U���̂܂܁C�傫���͎���ɏ������Ȃ�C��ɋ߂Â��Ă����l�q��������D�����ŁC$\frac{\omega}{p}\pm1$�C�����C$\omega\pm p$�̑O��ŐU���̕������ω�����D
Quiz 1 ����͉����Ӗ�����ƍl������悢�ł��낤���H
$\omega\approx p$�ōl����Ɨ]���I�ȕϓ��������I�ȕϓ��ɕς��Ƃ������Ƃ����������D����́C�U���̊�{�\���ł���C�U���C�U�����C�ʑ����g���ĕ\�킷�Ǝ��̂悤�ɂȂ�D�����C
\begin{eqnarray*}
x= A\cos(\omega t - \varphi)
\end{eqnarray*}
�ɂ����āC$0\leq \omega < p$�ł́C$\varphi=0$�ł���C$\omega \approx p$�̂Ƃ��ɂ́C$\varphi=\frac{\pi}{2}$�ƍl����ƁC
\begin{eqnarray*}
x= A\cos(\omega t - \frac{\pi}{2}) =A\sin\omega t
\end{eqnarray*}
�ƕό`�ł���D����ɁC$\omega\geq p$�̂Ƃ��ɁC$\varphi = \pi$�ƍl�����
\begin{eqnarray*}
x= A\cos(\omega t - \pi) =�@-A\cos\omega t
\end{eqnarray*}
�ƂȂ�C�U���̕����̕ω��́C�h�ʑ��h���g���čl���Ȃ��Ă��ǂ����ƂɂȂ�D�����C�U���͑傫���݂̂��l����Ηǂ��̂ŁC�����Ȑ���U���ƈʑ����g���ĕ\�킷�Ɛ}9-4�̂悤�ɂȂ�D
�@
�@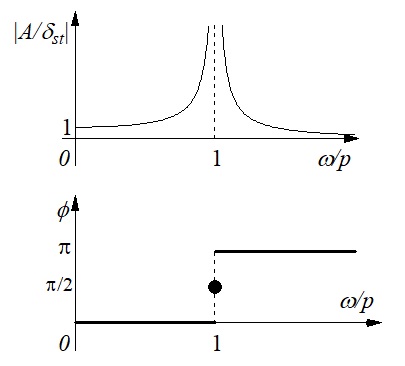
�@�}9-4�@�P���R�x�s�����n�̎��g�������̐U���ƈʑ�����
�@
�}9-4�Ɏ����U�������́C�@�B���^�]����ۂ̔����Ƃ��ėp�����邱�Ƃ�����D�����C�^�]���̐U���U����l��$r$�̏ꍇ�C
\begin{eqnarray*}
\left|A\right| =\frac{\delta_{st}}{\left|1-\left(\frac{\omega}{p}\right)^2\right|}\leq r
\end{eqnarray*}
�ƂȂ�悤�ɁC$\delta_{st}$�C$p$�C$\omega$�Ȃǂ���������D���̋��e�l���z����$\omega$���댯�͈͂ƌĂсC����������v��^�]�͈͂��ݒ肳���D�܂��C$\omega\rightarrow p$�̂Ƃ��C$\omega$���댯�p���g���̂悤�Ɂh�댯�h���^�Ƃ���������������D
9.3 ���K
(1) �����I�ȉ��U�͂�����鎿��$5$kg�̋@�B���˒萔$2$kN/m�̖h�U�S���Ŏx������D���U�͂̐U����$10$N�Ƃ��āC���U���g����5Hz�̎��C�����U���̐U���͂�����ɂȂ邩�H�܂��C���g����3Hz�ɂȂ�ƐU���͂�����ɂȂ邩�H
(2) �}9-5�Ɏ����n�̎���$m$�̕��̂ɁC�����g��̊O�͂���p����Ƃ��̒�퉞�����v�Z���C�����̐U���C�ʑ��C�U�����ɂ��Đ�������D�����ŁC$F_0=10$N�C$f_0=5$Hz�Ƃ���D
�@
�@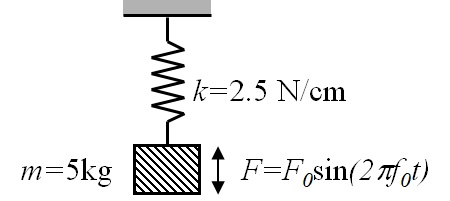
�@�}9-5�@�P���R�x�s�����n�̋����U��
�@