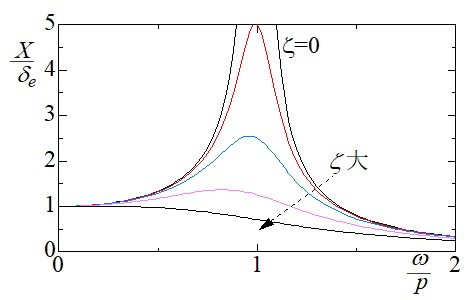
�@�}10-1�@�P���R�x�S�������n�̋����U��
�@
 �@
�@
| $\frac{\omega}{p}$ | $\quad\quad 0\quad\quad$ | $\quad\quad\sqrt{1-2\zeta^2}\quad\quad$ | ||
| $\quad\quad\frac{df\left(\frac{\omega}{p}\right)}{d\left(\frac{\omega}{p}\right)}\quad\quad$ | $\quad\quad0\quad\quad$ | $\quad\quad+\quad\quad$ | $\quad\quad 0\quad\quad$ | $\quad\quad -\quad\quad$ |
| $\quad\quad f\left(\frac{\omega}{p}\right)\quad\quad$ | $\quad\quad\nearrow\quad\quad$ | $\quad\quad\searrow\quad\quad$ |