�S�D��]�ƕ��i��2���R�x�U���n
�@�@�B�V�X�e���̉^���́C��ʂɉ�]�^�����Ȃ�����i�^����������C���i�^�����Ă���Œ��ɉ�]��������邱�Ƃ����X���݂���D�����ł́C���i�^���Ɖ�]�^�����e�P���l�����ꍇ�̐U�����ɂ��čl����D
4.1 �ˎx�����ꂽ���̂̐U��
�@��p�Ԃ̏㉺�U���ɂ����āC�d�S�̉^�������łȂ��C�O�֕��C��֕��Ȃǂ̈ʒu�ɂ�����ϓ��܂Œ��ׂ����ꍇ�ɂ́C�ԑ̂ɑ傫�����������C�d�S�̏㉺�^���Əd�S���̉�]�^���̂Q���l���邱�Ƃɂ��C������x�̎��͒��ׂ邱�Ƃ��ł���D
�@�}4-1�́C��p�Ԃ�^�����猩���ꍇ�̃��f���ŁC�ԑ̑S�̂̎��ʂ�$m$�C�d�S���̊������[�����g��$J$�Ƃ��C�d�S�ʒu��G�ŁC�d�S�ʒu����O��ڒn�_�܂ł̐����������������ꂼ��$l_1$�C$l_2$���Ă���C�O��ڒn�_�Ŏԑ̂��x���Ă���T�X�y���V�����ɑΉ�����˂̂˒萔�����ꂼ��$k_1$�C$k_2$�Ƃ��������f���ł���D���̌n�ɑ���^���������o���C��̓I�ȌŗL�U�����ƌŗL���[�h���v�Z���C�U�������ɂ��Ē��ׂ�D�e���f���p�����[�^�l�Ƃ��āC���ۂ̕��ʎ����Ԃ̒l��z�肵�āC$m=1600$kg, $J=mR^2=2304$kg$\cdot$m$^2$, $l_1=1.3$m, $l_2=1.7$m, $k_1=3.92\times10^4$N/m, $k_2=4.41\times10^4$N/m�Ƃ��āC���ۂɌv�Z���s���D
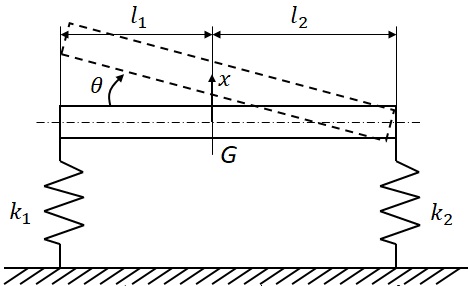
�}4-1�@��p�Ԃ̏㉺-�s�b�`�^�����f��
�@
4.2 �n�̉^��������
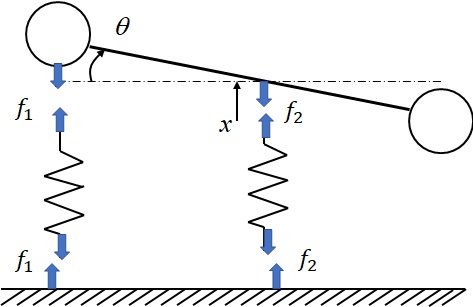
�@�ԑ̂͏d�SG��$x$�㑤�ɕψʂ��C�d�S�𒆐S�Ɏ��v����$\theta$��]����Ƃ��C�O��ւ˂ɂ́C�����͂��������Ă���Ƃ���ƁC���̌n�ɑ���Free-body Diagram�́C�}4-2�̂悤�ɂȂ�D�O��֕��̂˂̐L��$\Delta_1$�C$\Delta_2$�́C�����ό`�����肷��ƁC$\sin\theta\simeq\tan\theta\simeq\theta$�Ƃ������Ƃ��ł���̂ŁC���ꂼ��
\begin{eqnarray*}
&& \Delta_1=x+l_1\sin\theta = x+l_1\tan\theta \simeq x + l_1\theta \\
&& \Delta_2=x-l_2\sin\theta = x-l_2\tan\theta \simeq x - l_2\theta
\end{eqnarray*}
�ƂȂ�D�����C�O��ւ˕��ɔ������������$f_1$�C$f_2$�͂��ꂼ��
\begin{eqnarray*}
&& f_1= k_1\Delta_1 = k_1\left(x + l_1\theta\right) \\
&& f_2= k_2\Delta_2 = k_2\left(x - l_2\theta\right)
\end{eqnarray*}
�ƕ\���ł���D�����̗͂ɂ���Ĕ�������d�S���̃��[�����g$M_G$�͎��v���𐳂Ƃ����
\begin{eqnarray*}
M_G =-l_1\cos\theta\times f_1 + l_2\cos\theta\times f_2
\end{eqnarray*}
�����ό`�����肷���$\cos\theta\simeq1$�Ȃ̂ŁC
\begin{eqnarray*}
M_G \simeq -l_1\times f_1 + l_2\times f_2
\end{eqnarray*}
�d�͂ɂ��d�S���̃��[�����g�͗�ƂȂ�̂ŁC��]�^�������߂郂�[�����g��$M_G$�݂̂ƂȂ�D����āC�����U�������肵���ꍇ�̎ԑ̂̕��i�^���Əd�S���̉�]�^���ɑ���^���������͎��̂悤�ɂȂ�D
\begin{eqnarray*}
&& m\ddot{x} = -f_1 - f_2 -mg = -k_1\Delta_1 -k_2\Delta_2 - mg = -k_1\left(x + l_1\theta\right)-k_2\left(x - l_2\theta\right) - mg \\
&& J\ddot{\theta} = M_G = -l_1\times f_1 + l_2\times f_2 = -l_1\times k_1\left(x + l_1\theta\right)+l_2\times k_2\left(x - l_2\theta\right)
\end{eqnarray*}
�@
�@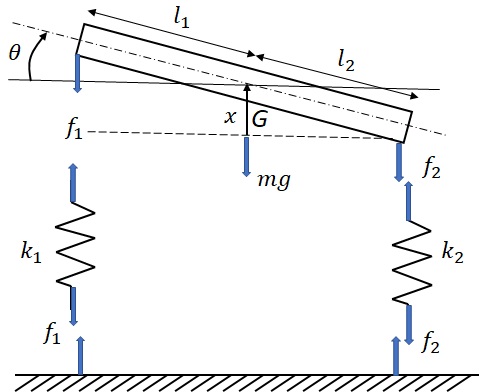
�@�}4�]2�@��p�Ԃ̏㉺-�s�b�`�^�����f���ɑ���Free-body Diagram
�@
��������ƁC���̌n�̉^���������͎����̂悤�ɂȂ�D
\begin{eqnarray*}
&& m\ddot{x} + \left(k_1+k_2\right)x + \left(k_1l_1-k_2l_2\right)\theta= -mg \\
&& J\ddot{\theta} + \left(k_1l_1-k_2l_2\right)x + \left(k_1l_1^2+k_2l_2^2\right)\theta=0
\end{eqnarray*}
���̕������ɂ����āC�ÓI�Ȓނ荇����Ԃ��l����ƁC$\ddot{x}=0$�C$\ddot{\theta}=0$�ł���C�ψʂƉ�]�́C$x=x_0$�C$\theta=\theta_0$�Ȃ���l�Ƃ�����̂ŁC
\begin{eqnarray*}
&& \left(k_1+k_2\right)x_0 + \left(k_1l_1-k_2l_2\right)\theta_0 = -mg \\
&& \left(k_1l_1-k_2l_2\right)x_0 + \left(k_1l_1^2+k_2l_2^2\right)\theta_0 = 0
\end{eqnarray*}
����āC$x$�C$\theta$�̌��_�����炵�C$x+x_0$�C$\theta+\theta_0$�ŕ\���ł���V���ȕϐ�$x$�C$\theta$�����Ɖ^���������͎��̂悤�ɂȂ�D
\begin{eqnarray*}
&& \quad \left.\begin{array}{l}
m\ddot{x} + \left(k_1+k_2\right)\left(x+x_0\right) + \left(k_1l_1-k_2l_2\right)\left(\theta+\theta_0\right) = -mg \\
J\ddot{\theta} + \left(k_1l_1-k_2l_2\right)\left(x+x_0\right) + \left(k_1l_1^2+k_2l_2^2\right)\left(\theta+\theta_0\right)=0
\end{array}\right\} \\
&& \therefore \left.\begin{array}{l}
m\ddot{x} + \left(k_1+k_2\right)x + \left(k_1l_1-k_2l_2\right)\theta + \left(k_1+k_2\right)x_0 + \left(k_1l_1-k_2l_2\right)\theta_0 = -mg \\
J\ddot{\theta} + \left(k_1l_1-k_2l_2\right)x + \left(k_1l_1^2+k_2l_2^2\right)\theta + \left(k_1l_1-k_2l_2\right)x_0 + \left(k_1l_1^2+k_2l_2^2\right)\theta_0 = 0
\end{array}\right\} \\
\end{eqnarray*}
����āC�ÓI�Ȓނ荇����Ԃ���̉^�����l����ꍇ�ɂ́C�ÓI�Ȓނ荇����Ԃ̊W���g���āC���̂悤�ȉ^���������Ƃ��邱�Ƃ��ł���D
\begin{eqnarray*}
&& m\ddot{x} + \left(k_1+k_2\right)x + \left(k_1l_1-k_2l_2\right)\theta= 0 \\
&& J\ddot{\theta} + \left(k_1l_1-k_2l_2\right)x + \left(k_1l_1^2+k_2l_2^2\right)\theta=0
\end{eqnarray*}
���̂悤�ɁC�d�͕����Ɠ��������̏d�S�̕��i�^���C�d�S���̉�]�^�����l���C�ÓI�Ȓނ荇����Ԃ����_�Ƃ�����i�C��]�ψʂ��l���邱�Ƃɂ��C�d�͂��L�����Z�������`�̉^�������������߂邱�Ƃ��ł���D
4.3 �ŗL�U�����ƌŗL���[�h
�@����ꂽ�^�������������ꂼ��$m$�C$J$�Ŋ����
\begin{eqnarray*}
&& \ddot{x} + \frac{k_1+k_2}{m}x + \frac{k_1l_1-k_2l_2}{m}\theta=0\\
&& \ddot{\theta} + \frac{k_1l_1-k_2l_2}{J}x + \frac{k_1l_1^2+k_2l_2^2}{J}\theta=0
\end{eqnarray*}
����W�������ꂼ��$X$�C$\Theta$�C$p$���p�U�����Ƃ��ĉ��������Ƃ����D
\begin{eqnarray*}
&& x=Xe^{ipt} \\
&& \theta=\Theta e^{ipt}
\end{eqnarray*}
�^���������ɑ�����C��������Ǝ�����D
\begin{eqnarray*}
&& \left(-p^2 + \frac{k_1+k_2}{m}\right)X + \frac{k_1l_1-k_2l_2}{m}\Theta=0\\
&& \frac{k_1l_1-k_2l_2}{J}X + \left(-p^2+\frac{k_1l_1^2+k_2l_2^2}{J}\right)\Theta = 0
\end{eqnarray*}
���̎����s��`���ŕ\����
\begin{eqnarray*}
\left[\begin{array}{cc}
-p^2 + \frac{k_1+k_2}{m} & \frac{k_1l_1-k_2l_2}{m}\\
\frac{k_1l_1-k_2l_2}{J} & -p^2+\frac{k_1l_1^2+k_2l_2^2}{J}
\end{array}\right]\left[\begin{array}{c}
X \\ \Theta
\end{array}\right]=\left[\begin{array}{c}
0 \\ 0
\end{array}\right]
\end{eqnarray*}
����āC$X$�C$\Theta$�����ɗ�ɂ͂Ȃ�Ȃ��������݂��邽�߂ɂ́C���ӂ̌W���s��ɂ��Ď��̊W�����藧�K�v������D
\begin{eqnarray*}
\left|\begin{array}{cc}
-p^2 + \frac{k_1+k_2}{m} & \frac{k_1l_1-k_2l_2}{m}\\
\frac{k_1l_1-k_2l_2}{J} & -p^2+\frac{k_1l_1^2+k_2l_2^2}{J}
\end{array}\right| = \left(-p^2 + \frac{k_1+k_2}{m}\right)\left(-p^2+\frac{k_1l_1^2+k_2l_2^2}{J}\right) - \left(\frac{k_1l_1-k_2l_2}{m}\right)\left(\frac{k_1l_1-k_2l_2}{J}\right)= 0
\end{eqnarray*}
�����C���̊p�U����$p$�Ɋւ���4������������܂�D
\begin{eqnarray*}
p^4 - \left(\frac{k_1+k_2}{m}+\frac{k_1l_1^2+k_2l_2^2}{J}\right)p^2 + \frac{\left(k_1+k_2\right)\left(k_1l_1^2+k_2l_2^2\right)}{mJ}- \frac{\left(k_1l_1-k_2l_2\right)^2}{mJ}= 0
\end{eqnarray*}
���̕�������$p^2$��2���������ł���̂ŁC���̐����ɂ��čl����D���ʎ�$D$�́C
\begin{eqnarray*}
D=\left(\frac{k_1+k_2}{m}+\frac{k_1l_1^2+k_2l_2^2}{J}\right)^2-\frac{4\left(k_1+k_2\right)\left(k_1l_1^2+k_2l_2^2\right)}{mJ}+ \frac{4\left(k_1l_1-k_2l_2\right)^2}{mJ}=\left(\frac{k_1+k_2}{m}-\frac{k_1l_1^2+k_2l_2^2}{J}\right)^2 + \frac{4\left(k_1l_1-k_2l_2\right)^2}{mJ}\geq 0
\end{eqnarray*}
�ƂȂ�̂ŁC$p^2$�́C�Q�̎����ƂȂ�D�܂��C���̕������̒萔����
\begin{eqnarray*}
\frac{\left(k_1+k_2\right)\left(k_1l_1^2+k_2l_2^2\right)}{mJ}- \frac{\left(k_1l_1-k_2l_2\right)^2}{mJ}= \frac{k_1k_2\left(l_1+l_2\right)^2}{mJ} > 0
\end{eqnarray*}
�ƂȂ�̂ŁC
\begin{eqnarray*}
\left(\frac{k_1+k_2}{m}+\frac{k_1l_1^2+k_2l_2^2}{J}\right)^2 > D = \left(\frac{k_1+k_2}{m}+\frac{k_1l_1^2+k_2l_2^2}{J}\right)^2-\frac{4k_1k_2\left(l_1+l_2\right)^2}{mJ}
\end{eqnarray*}
���C
\begin{eqnarray*}
\frac{k_1+k_2}{m}+\frac{k_1l_1^2+k_2l_2^2}{J} > \sqrt{D}
\end{eqnarray*}
����āC$p^2$�͐��̒l���Ƃ�̂ŁC�l�̏����������珇��$p_1$�C$p_2$�Ƃ���ƁC�ŗL�p�U�����͎����ɂ���܂邱�ƂɂȂ�D
\begin{eqnarray*}
\left.\begin{array}{l}
p_1^2 \\ p_2^2
\end{array}\right\}= \frac{1}{2}\left[\frac{k_1+k_2}{m}+\frac{k_1l_1^2+k_2l_2^2}{J} \mp \sqrt{D}\right]
\end{eqnarray*}
�܂��C���̏ꍇ�̐U����́C�^����������P�����g����
\begin{eqnarray*}
&& \left(-p^2 + \frac{k_1+k_2}{m}\right)X + \frac{k_1l_1-k_2l_2}{m}\Theta=0\\
&& \therefore \frac{X}{\Theta}=\frac{k_1l_1-k_2l_2}{k_1+k_2-mp^2}
\end{eqnarray*}
�ƂȂ�̂ŁC�Q�̌ŗL�p�U����$p_j(j=1,2)$�ɑ��āC�U�����[�h�ɑΉ�����Q�̐U���䂪�����Œ�܂邱�ƂɂȂ�D
\begin{eqnarray*}
\left.\frac{X}{\Theta}\right|_j=\frac{k_1l_1-k_2l_2}{k_1+k_2-mp_j^2}\equiv \lambda_j
\end{eqnarray*}
���l�������āC�ŗL�p�U�������v�Z�����
\begin{eqnarray*}
&& p_1\fallingdotseq 6.91\text{rad/s}\\
&& p_2\fallingdotseq 9.401\text{rad/s}
\end{eqnarray*}
�ƂȂ�̂ŁC��P���Ƒ�Q���̌ŗL�U�����́C���̒l�ƂȂ�D
\begin{eqnarray*}
f_1\fallingdotseq 1.10\text{Hz}\\
f_2\fallingdotseq 1.50\text{Hz}
\end{eqnarray*}
�܂��C�U�����
\begin{eqnarray*}
&& \lambda_1\fallingdotseq 3.472 \text{m}\\
&& \lambda_2\fallingdotseq -0.413 \text{m}
\end{eqnarray*}
�ƂȂ�D�����ŁC
\begin{eqnarray*}
\left.\begin{array}{l}
x=X_je^{ip_jt} \\
\theta=\Theta_je^{ip_jt}
\end{array}\right\}
\end{eqnarray*}
�ɂ����āC�d�SG�̏㉺�����U��$X_j$�ɑ��C�d�S����$\Theta_j$��]�����邱�Ƃɂ��C�U��$X_j$�C$\Theta_j$�C$\lambda_j$�̈ʒu�W���l����D�����ŁC$\lambda_2$�͕������ł���̂ŁC��]���t�����ɉ�]�����邱�Ƃɂ���Ɛ}4-3�̂悤�Ȉʒu�W���߂邱�Ƃ��ł���D��߂�ꂽ�U����$\lambda_j(j=1,2)$�́C�e���[�h�ɂ����Ďԑ́i���邢�͂���𐅕������ɉ�����������j�̐U���U������ƂȂ�_$D_j(j=1,2)$�������ʒu�ɑΉ����Ă���D���i�^���Ɖ�]�^�������̂̉^���́C�u�Ԓ��S���̉�]�^�������ŕ\���ł��邪�C�ŗL�U������������ꍇ�ɂ����ẮC�U����$\lambda_j$�Œ�܂�_$D_j$�𒆐S�Ƃ�����]�U���ŐU������C�����C���̌n�́C�ŗL�U����$f_j$�ŐU������ꍇ�C�U����$\lambda_j$�Œ�܂�_$D_j$�𒆐S�Ƃ�����]�U�����[�h������邱�Ƃ��킩��D
�@
�@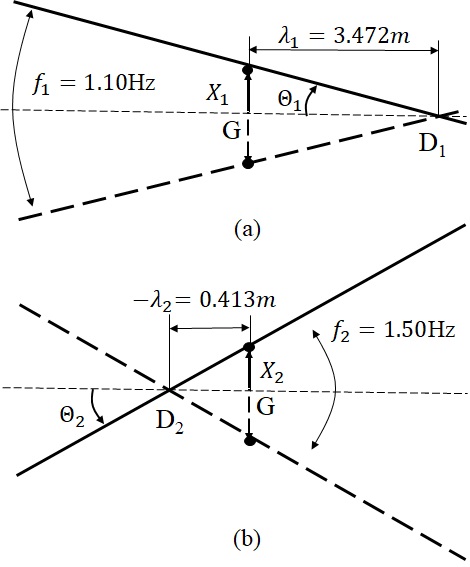
�@�}4-3�@��p�Ԃ̏㉺-�s�b�`�^���ɑ���Q�̐U�����[�h
�@
4.4 �W�����ʌn�̕��i�E��]�^�����f��
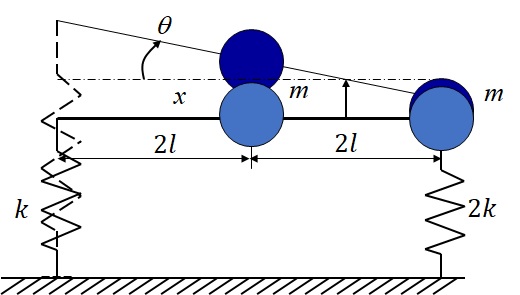
�@���ʂ���l�ɕ��z���Ă���i�ƍl�����j���̂ɑ��āC�d�S�ʒu�ł͂Ȃ��C���̈ʒu�Ɏ��ʂ�U�蕪���āi���z�����āj�l����U�����l������D�}4-4�́C�S�̂̒�����$l$�ŁC���ʂ������ł��鍄�̖_�̗��[��$m$�̎��ʂ��W�����Ă���ƍl�������̂ɑ��āC���[�̎��ʂ�z�����ӏ��Ƌ���$l$���ꂽ�S�̂̒��S�ʒu���˒萔$k$�̂˂Ŏx�������n��\���Ă���C���̃��f���ɂ��C�㉺���i�^���Ɩʓ��̉�]�^�����l���邱�Ƃ��ł���D
�@
�@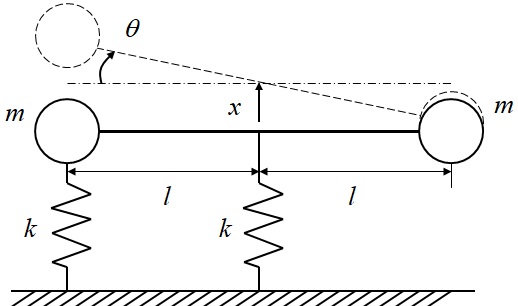
�@�}4-4�@�㉺-�s�b�`�^���W�����ʌn���f��
�@
�@�@���̏ꍇ�C�S�̂̎��ʂ�$2m$�ŏd�S�ʒu�́C�˂Ŏx������Ă��钆�S�ʒu�ł���D�܂��C�d�S���̊������[�����g�́C$2\times ml^2$�ƂȂ�D�e���ʂɑ���^�����l����̂łȂ��C����$2m$�C�d�S���̊������[�����g��$2ml^2$�̕��̂̉^���Ƃ��āC�^�����������l���邱�Ƃɂ���D�˂Ŏx������Ă��鍶�[�̎��ʕ����ƒ������ɍ�p����͂ɂ��āC�˂Ɉ����͂������Ƃ����Free-body Diagram�́C�}4-5�̂悤�ɂȂ�D
�@
�@
�@�}4-5�@�㉺-�s�b�`�^���W�����ʌn���f���ɑ���Free-body Diagram
�@
�ÓI�Ȓނ荇����Ԃ����_�Ƃ���㉺�����ψʂ�$x$�C��]�p�ψʂ�$\theta$�Ƃ��āC�d�͍��̉e�����l����K�v�������̂ŁC���̂ɍ�p����͂͐}�Ɏ����悤�Ȃ˗݂͂̂ƂȂ�D�����ŁC�����ό`�����肷��ƁC���[�̕ψʂ́C$x+l\theta$�ƂȂ�̂ŁC�����̂˂̐L�т�$\Delta_1=x+l\theta$�ƂȂ�D���S���͕ψ�$x$�Ȃ̂ŁC�ːL�ѕψʂ́C$\Delta_2=x$�ł���D����āC�}�Ɏ����˗�$f_1$�C$f_2$�͎��̂悤�ɂȂ�D
\begin{eqnarray*}
&& f_1=k\left(x+l\theta\right) \\
&& f_2=kx
\end{eqnarray*}
�܂��C�d�S���̃��[�����g�́C$M_O=-l\times f_1$�݂̂ƂȂ�̂ŁC���̌n�̏d�S�̏㉺�����^���Əd�S���̉�]�^���ɑ���^���������͎��̂悤�ɂȂ�D
\begin{eqnarray*}
&& 2m\ddot{x} = -f_1-f_2 = -k\left(x+l\theta\right)-kx \\
&& 2ml^2\ddot{\theta} = M_O = -l\times f_1 = -kl\left(x+l\theta\right)
\end{eqnarray*}
��������ƌn�̉^���������͎��̂悤�ɂȂ�D
\begin{eqnarray*}
\left.\begin{array}{l}
2m\ddot{x} + 2kx + kl\theta =0\\
2ml^2\ddot{\theta} + klx + kl^2\theta=0
\end{array}\right\}
\end{eqnarray*}
���̂ōl�����ꍇ�ƂقƂ�Ǔ����ł���̂ŁC���̕�������p���āC�ŗL�U�����ƌŗL���[�h���v�Z���C�n�̌ŗL���[�h�ɂ��čl�@���Ă݂�Ɨǂ��D
4.5 ���K
�P�D�}4-6�Ɏ����悤�Ȍn�̏㉺���i�^���Ɩʓ��̉�]�^���ɑ���^�����l����D�Ԋu$l$�ŁC����$m$�̂R�̕��̂��Ȃ��ł���_�̎��ʂ͖����ł��C�d�S�ψʂ�$x$�C�d�S���̉�]��$\theta$�Ƃ��āC�ȉ��̖�ɓ����Ȃ����D
�@(1) �n�̉^�������������߂Ȃ����D
�@(2) �n�̌ŗL�p�U���������Ŏ����Ȃ����D
�@(3) �n�̌ŗL���[�h�ɂ��Đ������Ȃ����D

�}4-6�@�W�����ʂ�z�����n�̏㉺-�s�b�`�U�����f��
�Q�D�}4-7�Ɏ����悤�ɁC���ʂ������ł��钷��$4l$�̖_�̗��[�́C�˒萔$k$, $2k$�̂˂Ŏx������Ă���C�_�����ƉE�[�ɂ��ꂼ�ꎿ��$m$�̕��̂��z�u����Ă���Ƃ���D�d�S�ψʂ�$x$�C�d�S���̉�]��$\theta$�Ƃ��āC�ȉ��̖�ɓ����Ȃ����D
(1) �n�̉^�������������߂Ȃ����D
(2) �n�̌ŗL�p�U���������Ŏ����Ȃ����D
(3) �n�̌ŗL���[�h�ɂ��Đ������Ȃ����D
�}4-7�@�Q�̏W�����ʂ������̂̏㉺-�s�b�`�U�����f��