�U�D2���R�x�n�̕ψʂɂ�鋭���U��
�@�r�f�I�F�h�U���̐��E�h
6.1 ���F�����ԑ��s���̏㉺�����U��
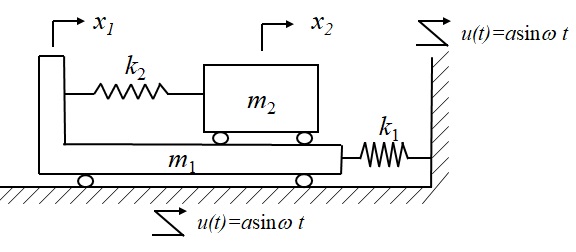
���ʘH�ʂ𑖍s���鎩���Ԃ̐U���ׂ邽�߂ɁC�}6-1�Ɏ����悤�ɁC���ʘH�ʂ̕\�ʂ́C�g��$\lambda$�C�U��$a$�Ő����I�ɕω�����`������Ă��莩���Ԃ����s���Ă��H�ʌ`�ω����邱�Ƃ͖��������ł���Ɖ��肵�C�Q���R�x�U���n�̉������l����D�^�C���C�Ԏ����ˉ����ʂɑΉ�����$m_1$���^�C�������ɑΉ�����˒萔$k_1$�̂˂ŘH�ʏ�ɐڒn���C�T�X�y���V�������ɑΉ�����˒萔$k_2$�̂˂ŁC�ԑ̓��ˏ�̎��ʂɑΉ�����$m_2$�̎��ʂ��x���Ă���n�ł���D���x$v$�ő��s����ƘH�ʂ���̕ψʓ��͂́C��g��$\lambda$�Ŋ�ʒu�i��j����U��$a$�܂ŏオ������C���n�ɖ߂肳���$-a$�ւ܂ʼn���������C��ʒu�܂Ŗ߂�Ƃ��������I�ȕϓ�����D�]���āC�}�Ɏ����悤�ɏ㉺�����̉��U�p���g���������̂悤�ɍl���邱�Ƃ��ł���D
\begin{eqnarray*}
\omega = \frac{2\pi v}{\lambda}
\end{eqnarray*}
����āC�˒萔$k_1$�̂˂̉��[�́C�㉺������
\begin{eqnarray*}
u = a\sin\omega t
\end{eqnarray*}
�Łh�ψʓ��́h���邱�ƂɂȂ�D�����̎�����C���s���x$v$���グ��Ǝ����Ԃ̘H�ʂ���̉��U�p���g���͑Ή����ďオ���čs�����Ƃ�������D
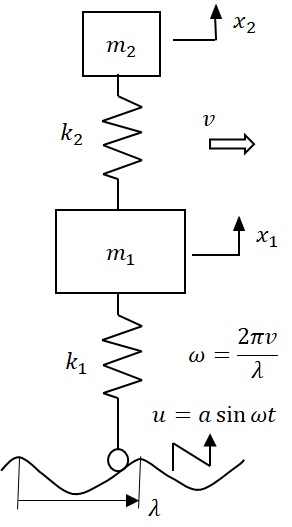
�}6-1�@�H�ʏ�𑖍s����Q���R�x�U���n���f��
�@
�@�}6-1�Ɏ����悤�Ɋe����$m_1$�C$m_2$�̏㉺���ψʂ����ꂼ��$x_1$�C$x_2$�Ƃ��C�e�˂Ɉ����͂��������Ă���C�Ɖ��肷��ƁC�}6-2�Ɏ����悤��Free-body Diagram��`�����Ƃ��ł���D�˒萔$k_1$�C$k_2$�̂˂̐L�т͂��ꂼ��C
\begin{eqnarray*}
&& \Delta_1=x_1-u \\
&& \Delta_2=x_2-x_1
\end{eqnarray*}
�ł���̂ŁC�˂ɔ������������$f_1$�C$f_2$�͎����ƂȂ�D
\begin{eqnarray*}
&& f_1=k_1\Delta_1=k_1\left(x_1-u\right) \\
&& f_2=k_2\Delta_2=k_2\left(x_2-x_1\right)
\end{eqnarray*}
����āC�Q�̎��ʂɑ��āC�j���[�g���̑�Q�@����K�p����Ǝ����ƂȂ�D
\begin{eqnarray*}
&& m_1\ddot{x}_1 = -f_1+f_2 = -k_1\left(x_1-u\right)+k_2\left(x_2-x_1\right) \\
&& m_2\ddot{x}_2 = -f_2 = -k_2\left(x_2-x_1\right)
\end{eqnarray*}
$u=a\sin\omega t$�������Đ�������ƁC���̉^���������ƂȂ�D
\begin{eqnarray*}
&& m_1\ddot{x}_1 +\left(k_1+k_2\right)x_1- k_2x_2 = k_1a\sin\omega t \\
&& m_2\ddot{x}_2 - k_2x_1 + k_2x_2 =0
\end{eqnarray*}
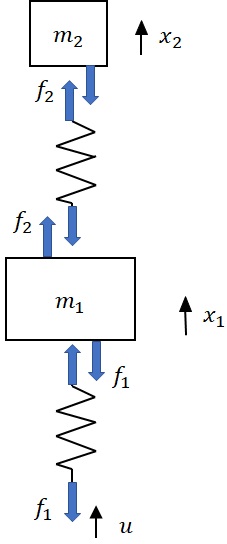
�}6-2�@�H�ʏ�𑖍s����Q���R�x�U���n���f����Free-body Diagram
�@
�@�����U�����������l����ƁC����$x_j=X_j\sin\omega t(j=1,2)$�Ƃ�����̂ŁC������Đ�������Ǝ�����D
\begin{eqnarray*}
&& \left(-m_1\omega^2+k_1+k_2\right)X_1- k_2X_2 = k_1a \\
&& -k_2X_1 + \left(-m_2\omega^2 + k_2\right)X_2 =0
\end{eqnarray*}
�s��`���ŕ\�����C�s��W��$X_J(j=1,2)$�����߂�D
\begin{eqnarray*}
\left[\begin{array}{cc}
k_1+k_2-m_1\omega^2 & - k_2\\
-k_2 & k_2-m_2\omega^2
\end{array}\right]\left[\begin{array}{c}
X_1 \\ X_2
\end{array}\right] = \left[\begin{array}{c}
k_1a \\ 0
\end{array}\right]
\end{eqnarray*}
�W���s��̋t�s��������炩����Ǝ�����D
\begin{eqnarray*}
\left[\begin{array}{c}
X_1 \\ X_2
\end{array}\right] &=& \frac{1}{\left(k_1+k_2-m_1\omega^2\right)\left(k_2-m_2\omega^2\right)-k_2^2}
\left[\begin{array}{cc}
k_2-m_2\omega^2 & k_2\\
k_2 & k_1+k_2-m_1\omega^2
\end{array}\right]
\left[\begin{array}{c}
k_1a \\ 0
\end{array}\right]\\
&=& \frac{k_1a}{\left(k_1+k_2-m_1\omega^2\right)\left(k_2-m_2\omega^2\right)-k_2^2}
\left[\begin{array}{c}
k_2-m_2\omega^2 \\ k_2
\end{array}\right]
\end{eqnarray*}
�����ŁC�㎮�̕�����ɂ���$\omega$�C�����C�Q�̌ŗL�p�U������$p_1$�C$p_2$�Ƃ����
\begin{eqnarray*}
\left[\begin{array}{c}
X_1 \\ X_2
\end{array}\right]
= \frac{k_1a/m_1}{\left(\omega^2-p_1^2\right)\left(\omega^2-p_2^2\right)}
\left[\begin{array}{c}
\frac{k_2}{m_2}-\omega^2 \\ \frac{k_2}{m_2}
\end{array}\right]
\end{eqnarray*}
�A��
\begin{eqnarray*}
\left.\begin{array}{l}
p_1^2 \\ p_2^2 \end{array}\right\} = \frac{1}{2}\left\{\frac{k_1+k_2}{m_1}+\frac{k_2}{m_2}\mp\sqrt{\left(\frac{k_1+k_2}{m_1}+\frac{k_2}{m_2} \right)^2-\frac{4k_1k_2}{m_1m_2}} \right\}
\end{eqnarray*}
����āC���̌n�̋����U���ɑ��鉞���͎����̂悤�ɂȂ�D
\begin{eqnarray*}
&& x_1= \frac{\frac{k_1}{m_1}\left(\frac{k_2}{m_2}-\omega^2\right)}{\left(p_1^2-\omega^2\right)\left(p_2^2-\omega^2\right)}a\sin\omega t \\
&& x_2= \frac{\frac{k_1}{m_1}\frac{k_2}{m_2}}{\left(p_1^2-\omega^2\right)\left(p_2^2-\omega^2\right)}a\sin\omega t
\end{eqnarray*}
�U���ɂ��čX�ɁC$p^2=k_1/m_1$�C$p_a=k_2/m_2$�ƒu���Ǝ��̌`�ƂȂ�D
\begin{eqnarray*}
\left[\begin{array}{c}
X_1 \\ X_2
\end{array}\right]
= \frac{a}{\left\{\left(\frac{\omega}{p}\right)^2-\left(\frac{p_1}{p}\right)^2\right\}\left\{\left(\frac{\omega}{p}\right)^2-\left(\frac{p_2}{p}\right)^2\right\}}
\left[\begin{array}{c}
\left(\frac{p_a}{p}\right)^2-\left(\frac{\omega}{p}\right)^2 \\ \left(\frac{p_a}{p}\right)^2
\end{array}\right]
\end{eqnarray*}
6.2 �H�ʂɍ�p����͂Ɋւ���l�@
�@�^���������́C�e���_�̕ψʂ�p���ĕ\������Ă��邪�C�e�ڍ����C�ڒn���ɂ́C�͂���p�i�����j���Ă���D�Ⴆ�C�n�ʂɍ�p���Ă���́i�ϓ����j�́C�˒萔$k_1$�ɔ������Ă�������͂̔���$f_1$�ł���D�����͏�����Ɖ��肳��Ă��邪�C���ۂɌv�Z�����
\begin{eqnarray*}
f_1&=&k_1\left(x_1-u\right)=k_1\left[\frac{\left(\frac{p_a}{p}\right)^2-\left(\frac{\omega}{p}\right)^2}{{\left\{\left(\frac{\omega}{p}\right)^2-\left(\frac{p_1}{p}\right)^2\right\}\left\{\left(\frac{\omega}{p}\right)^2-\left(\frac{p_2}{p}\right)^2\right\}}}-1\right]a\sin\omega t \\
& = & k_1\left[\frac{\left(\frac{p_a}{p}\right)^2-\left(\frac{\omega}{p}\right)^2-\left(\frac{\omega}{p}\right)^4 + \left(\frac{\omega}{p} \right)^2\left\{\left(\frac{p_1}{p}\right)^2+\left(\frac{p_2}{p}\right)^2 \right\}-\left( \frac{p_1}{p}\right)^2\left(\frac{p_2}{p}\right)^2 }{{\left\{\left(\frac{\omega}{p}\right)^2-\left(\frac{p_1}{p}\right)^2\right\}\left\{\left(\frac{\omega}{p}\right)^2-\left(\frac{p_2}{p}\right)^2\right\}}}\right]a\sin\omega t
\end{eqnarray*}
�����ŁC
\begin{eqnarray*}
&& \left(\frac{p_1}{p}\right)^2+\left(\frac{p_2}{p}\right)^2=\left(\frac{k_1+k_2}{m_1}+\frac{k_2}{m_2}\right)\times\frac{m_1}{k_1}=1+\frac{m_2}{m_1}\left(\frac{p_a}{p}\right)^2+\left(\frac{p_a}{p}\right)^2 \\
&& \left(\frac{p_1}{p}\right)^2\left(\frac{p_2}{p}\right)^2=\frac{k_1}{m_1}\frac{k_2}{m_2}\times\left(\frac{m_1}{k_1}\right)^2=\left(\frac{p_a}{p}\right)^2
\end{eqnarray*}
�ƂȂ�̂ŁC���ʔ��$\beta=\frac{m_2}{m_1}$�Ƃ����ƁC�����̂悤�Ȍ`�ɂȂ�D
\begin{eqnarray*}
f_1= k_1\frac{\left(1+\beta\right)\left(\frac{p_a}{p}\right)^2-\left(\frac{\omega}{p}\right)^2 }{{\left\{\left(\frac{\omega}{p}\right)^2-\left(\frac{p_1}{p}\right)^2\right\}\left\{\left(\frac{\omega}{p}\right)^2-\left(\frac{p_2}{p}\right)^2\right\}}}\left(\frac{\omega}{p}\right)^2a\sin\omega t
\end{eqnarray*}
�n�ʂɍ�p����͂́C���̕ϓ����ƈ��̎��d���������������ƂȂ�D
\begin{eqnarray*}
f_1' = - \left(m_1+m_2\right)g + f_1
\end{eqnarray*}
���W�n��������𐳂Ƃ��Ă���̂ŁC�d�͂̍������ŕ\������邪�������ɂ�����́C�����C�n�ʂ������͂Ƃ��ẮC
\begin{eqnarray*}
f_1'' = \left(m_1+m_2\right)g - f_1 = \left(m_1+m_2\right)g-k_1\frac{\left(1+\beta\right)\left(\frac{p_a}{p}\right)^2-\left(\frac{\omega}{p}\right)^2 }{{\left\{\left(\frac{\omega}{p}\right)^2-\left(\frac{p_1}{p}\right)^2\right\}\left\{\left(\frac{\omega}{p}\right)^2-\left(\frac{p_2}{p}\right)^2\right\}}}\left(\frac{\omega}{p}\right)^2a\sin\omega t
\end{eqnarray*}
6.3 �S���������܂ތn�̉^���������Ɋւ���l�@
�}6-3(a)�Ɏ����悤�ȔS���������܂ތn���l����D�����C����$m_1$��$m_2$�̊Ԃɂ˂ƕ���ɔS�������W��$c$�̃_�V���|�b�g��z���C�����������܂ރ��f�����l����DFree-body Diagram�́C�}(b)�̂悤�ɂȂ�C����ɕ��ׂ��˂ƃ_�V���|�b�g���Ɉ����͂���������ƍl����Ƃ��ꂼ�ꎟ���ƂȂ�D
\begin{eqnarray*}
&& f_k=k_2\left(x_2-x_1\right) \\
&& f_c=c\left(\dot{x}_2-\dot{x}_1\right)
\end{eqnarray*}
�܂��C$f_1=k_1\left(x_1-u\right)$�ł���̂ŁC�^���������͎��̂悤�ɂȂ�D
\begin{eqnarray*}
&& m_1\ddot{x}_1 = -f_1 + f_k + f_c =-k_1\left(x_1-u\right) + k_2\left(x_2-x_1\right)+c\left(\dot{x}_2-\dot{x}_1\right) \\
&& m_2\ddot{x}_2 = -f_k - f_c = -k_1\left(x_2-x_1\right) - c\left(\dot{x}_2-\dot{x}_1\right)
\end{eqnarray*}
$k_1u$�́C�͂̒P�ʂ����̂ŁC$f_u=k_1u$�Ƃ����C��������Ǝ��̂悤�Ȍ`�ƂȂ�D
\begin{eqnarray*}
&& m_1\ddot{x}_1 + c\dot{x}_1 - c\dot{x}_2 + \left(k_1+ k2\right)x_1 - k_1x_2 = f_u \\
&& m_2\ddot{x}_2 - c\dot{x}_1 + c\dot{x}_2 - k_2x_1 + k_2x_2 = 0
\end{eqnarray*}
���̌n�͂Q���R�x�n�ł��邪�C�����R�x�n�͎��̂悤�ȍs��`���̉^���������ŋL�q����邱�Ƃ������D
\begin{eqnarray*}
\mathbf{M}\ddot{\mathbf{x}} + \mathbf{C}\dot{\mathbf{x}} + \mathbf{K}{\mathbf{x}} = \mathbf{f}
\end{eqnarray*}
�����ŁC
\begin{eqnarray*}
\mathbf{x}=\left[\begin{array}{c} x_1 \\ x_2 \end{array}\right]
\text{, }
\dot{\mathbf{x}}=\left[\begin{array}{c} \dot{x}_1 \\ \dot{x}_2 \end{array}\right]
\text{, }
\ddot{\mathbf{x}}=\left[\begin{array}{c} \ddot{x}_1 \\ \ddot{x}_2 \end{array}\right]
\end{eqnarray*}
�́C���ꂼ��C�ψʃx�N�g���C���x�x�N�g���C�����x�x�N�g���ƌĂ�C
\begin{eqnarray*}
\mathbf{f}=\left[\begin{array}{c} f_u \\ 0 \end{array}\right]
\end{eqnarray*}
�́C�̓x�N�g���ƌĂ��D�܂��C
\begin{eqnarray*}
\mathbf{M}=\left[\begin{array}{cc}
m_1 & 0 \\ 0 & m_2
\end{array}\right]
\text{, }
\mathbf{C}=\left[\begin{array}{cc}
c & -c \\ -c & c
\end{array}\right]
\text{, }
\mathbf{K}=\left[\begin{array}{cc}
k_1+k_2 & -k_2 \\ -k_2 & k_2
\end{array}\right]
\end{eqnarray*}
�́C���ꂼ��C���ʍs��C�����s��C�����s��ƌĂ��D
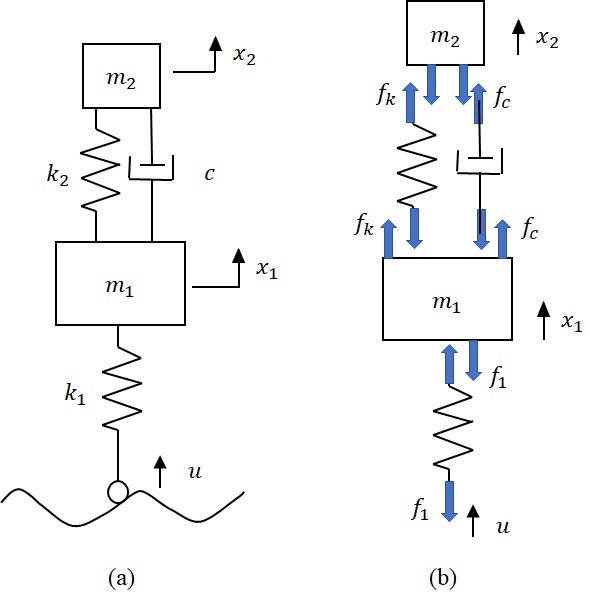
�}6-3�@�S���������܂ނQ���R�x�U���n���f��
�@
6.4 Fourie�ϊ��ɂ��^���������̕ϊ��ɂ���
�@���Ԃ̊��ł���e���_�̕ψ�$x_j=x_j(t)$�C����сC��$f=f(t)$��Fourie�ϊ��͊p���g��$\omega$�̈�ւ̕ϊ��́C�����P�ʂ�$i$�Ƃ��āC�����̂悤�ɕ\�����Ƃ��ł���D
\begin{eqnarray*}
X_j\left(\omega\right) = \int_{-\infty}^{\infty}x_j\left(t\right) e^{-i\omega t} \\
F\left(\omega\right) = \int_{-\infty}^{\infty}f\left(t\right) e^{-i\omega t}
\end{eqnarray*}
�܂��C���g��$f$�̈�ւ̕ϊ��̏ꍇ�ɂ́C$\omega=2\pi f$�ƂȂ邾���Ȃ̂ŁC�����̂悤�ɂȂ�D
\begin{eqnarray*}
X_j\left(\omega\right) = \int_{-\infty}^{\infty}x_j\left(t\right) e^{-i2\pi ft} \\
F\left(\omega\right) = \int_{-\infty}^{\infty}f\left(t\right) e^{-i2\pi ft}
\end{eqnarray*}
�����ŁC$x_j\left(t\right)$�́C$t=\pm\infty$�ŗ�ɂȂ�Ƃ����
\begin{eqnarray*}
&& \int_{-\infty}^{\infty}\dot{x}_j\left(t\right) e^{-i\omega t} =\left[x_j\left(t\right)e^{-i\omega t}\right] + i\omega\int_{-\infty}^{\infty}x_j\left(t\right) e^{-i\omega t}=i\omega X_j\left(\omega\right) \\
&& \int_{-\infty}^{\infty}\ddot{x}_j\left(t\right) e^{-i\omega t} = -\omega^2 X_j\left(\omega\right)
\end{eqnarray*}
�ƂȂ�̂ŁC���ʍs��C�����s��C�����s���ԓI�ɕω����Ȃ����l�ƂȂ�ꍇ�ɂ́C�s��`���ŕ\�����^����������Fourie�ϊ����邱�Ƃ��ł��C�����̂悤�ɂȂ�D
\begin{eqnarray*}
&& \left(-\omega^2\mathbf{M} + i\omega\mathbf{C} + \mathbf{K}\right)\mathbf{X}\left(\omega\right) = \mathbf{F}\left(\omega\right) \\
&& \therefore \mathbf{X}\left(\omega\right) = \left(-\omega^2\mathbf{M} + i\omega\mathbf{C} + \mathbf{K}\right)^{-1}\mathbf{F}\left(\omega\right)
\end{eqnarray*}
�̓x�N�g����Fourie�ϊ��x�N�g���ɂ������Ă���W���s��́C�h���g���������s��h�ƌĂ�C����H�w�Ŋw�Ԏ��g���`�B���Ɠ������̂ł���D
6.5 ���K
(1) �}6-4�́C����$m$�̓�̕���A�CB���˒萔$k$�̂˂łȂ���C���[�͂˒萔$k$����ĕǂɁC�E�[�͔S�������萔$c$�̃_�V���|�b�g��L���鐅���ʏ�����炩�ɉ^���ł���2���R�x�U���n��\���Ă���D�_�V���|�b�g�̑��[��$u(t)=a_0\sin\omega t$�̎����I�ȕψʓ��͂�������ꍇ�ɑ���A�CB�̋����U���ɑ���^�����������C��퉞���ɑ���U�������Ŏ����Ȃ����D
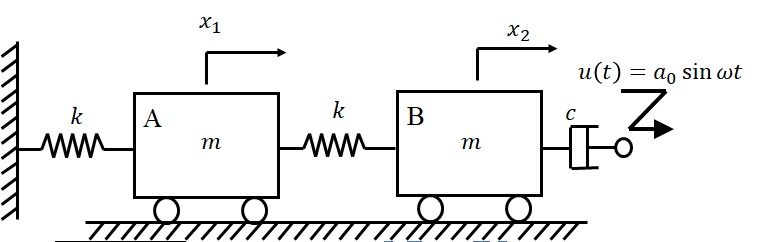
�}6-4�@�_�V���|�b�g������Q���R�x�U���n�̕ψʗ�U
(2) �}6-5�́C����$m_1$�̑�Ԃ��˒萔$k_1$�̂˂ŕǂɘA������Ă���C��ԏ�ɐݒu���ꂽ����$m_2$�̉ו����˒萔$k_2$�̂˂ő�ԂƘA�����ꂽ�n��\���Ă���D��Ԃ͒n�ʂɑ��Đ��������Ɋ��炩�ɓ������Ƃ��ł��C�ו����܂���ԏ�𐅕������Ɋ��炩�ɓ������Ƃ��ł���Ƃ���D�n�Ղ��}�Ɏ����悤�ɐ��������ɗh��Ă����Ԃ��l����D��퉞���U����^����ꂽ�L����p���Ď����D��퉞���U����^����ꂽ�L����p���Ď����C$m_1=10$[kg]�C$m_2=15$[kg]�C$k_1=1.75$[kN/m]�C$k_2=1.5$[kN/m]�̌n�ɑ��āC$a=1$ [cm]�Ƃ����Ƃ��C$m_1$�̉����U�����ŏ��ƂȂ�p���g��$\omega$�����߂�D
�}6-5�@�ψʗ�U����Q���R�x�U���n�̒�퉞��