10پDNژ©—R“xŒn‚ج“®—حٹwپCگU“®–â‘è
10.1 ‰ٌ“]‚ئ•ہگi‰^“®‚ً”؛‚¤‰^“®
گ}10-1پ@‰~’Œƒچپ[ƒ‰پ[‚ج‰^“®
پ@
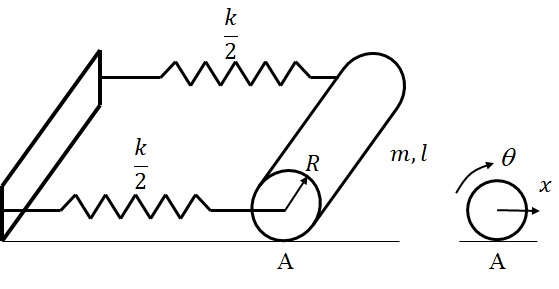
گ}10-1‚ةژ¦‚·—¼’[‚ج’†گS‚ً‚خ‚ثژxژ‚³‚ê‚ؤ•½–تڈم‚ة’u‚©‚ê‚ؤ‚¢‚éˆê—l‚ب‰~’Œƒچپ[ƒ‰پ[‚ج‰^“®‚ًچl‚¦‚éپDگ}‚ةژ¦‚·‚و‚¤‚ةƒچپ[ƒ‰’†گSپiڈdگSپj‚ج•ہگi‰^“®•دˆت‚ً$x$پC‰ٌ“]ٹp•دˆت‚ً$\theta$‚ئ‚µپC‚Q–{‚ج‚خ‚ث’èگ”‚ح‚»‚ꂼ‚ê$\frac{k}{2}$‚إ‚ ‚èپCƒچپ[ƒ‰‚جژ؟—ت‚ً$m$پC”¼Œa‚ً$R$پC’·‚³‚ً$l$‚ئ‚·‚éپD
پ@ƒچپ[ƒ‰پ[’†گSژ²‰ٌ‚è‚جٹµگ«ƒ‚پ[ƒپƒ“ƒg$J_0$‚حپC
\begin{eqnarray*}
J_0= \frac{1}{2}mR^2
\end{eqnarray*}
‚ئ‚ب‚é‚ج‚إپCƒچپ[ƒ‰پ[‚ج•ہگi‰^“®‚ئ‰ٌ“]‰^“®‚ةٹî‚أ‚‰^“®ƒGƒlƒ‹ƒMپ[$T$‚حژں‚ج‚و‚¤‚ة‚ب‚éپD
\begin{eqnarray*}
T = \frac{1}{2}m\dot{x}^2 + \frac{1}{2}J_0\dot{\theta}^2 = \frac{1}{2}m\dot{x}^2 + \frac{1}{2}\left(\frac{1}{2}mR^2\right)\dot{\theta}^2
\end{eqnarray*}
ˆê•ûپCƒ|ƒeƒ“ƒVƒƒƒ‹ƒGƒlƒ‹ƒMپ[‚حپC‚خ‚ث‚ة’~‚¦‚ç‚ê‚éƒGƒlƒ‹ƒMپ[‚ج‚ف‚إ‚ ‚é‚ج‚إژںژ®‚ئ‚ب‚éپD
\begin{eqnarray*}
U = \frac{1}{2}kx^2
\end{eqnarray*}
‚±‚±‚إپCƒچپ[ƒ‰پ[‚جگعگG“_A‚جڈًŒڈ‚ة‚آ‚¢‚ؤچl‚¦‚éپD
1) ƒچپ[ƒ‰پ[‚ھ–تڈم‚ً‚·‚ׂ炸“]‚ھ‚éڈêچ‡
‚±‚جڈêچ‡پCگعگG“_A‚ةژں‚ج‚و‚¤‚بچS‘©ڈًŒڈ‚ھگ¬—§‚·‚邱‚ئ‚ة‚ب‚éپD
\begin{eqnarray*}
x = R\theta
\end{eqnarray*}
‚و‚ء‚ؤپCƒ‰ƒOƒ‰ƒ“ƒWƒ…ٹضگ”$L$‚حژں‚ج‚و‚¤‚ة‚ب‚éپD
\begin{eqnarray*}
L=T-U = \frac{1}{2}m\left(R\dot{\theta}\right)^2 + \frac{1}{2}\left(\frac{1}{2}mR^2\right)\dot{\theta}^2-\frac{1}{2}k\left(R\theta\right)^2
\end{eqnarray*}
ˆê”تچہ•W‚ً$\theta$‚ئ‚·‚邱‚ئ‚ة‚و‚èپCƒ‰ƒOƒ‰ƒ“ƒWƒ…•û’ِژ®‚حژںژ®‚ئ‚ب‚éپD
\begin{eqnarray*}
\frac{d}{dt}\left(\frac{\partial L}{\partial\dot{\theta}}\right) - \frac{\partial L}{\partial\theta} = 0
\end{eqnarray*}
‚±‚±‚إپC
\begin{eqnarray*}
&& \frac{\partial L}{\partial\dot{\theta}}=\frac{3}{2}mR^2\dot{\theta}\text{ , }\frac{\partial L}{\partial\theta}=-kR\left(R\theta\right) \\
&& \frac{d}{dt}\left(\frac{3}{2}mR^2\dot{\theta}\right)+ kR^2\theta =0 \\
&& \therefore \frac{3}{2}mR~2\ddot{\theta} + kR^2\theta =0
\end{eqnarray*}
‚و‚ء‚ؤپC‚±‚جڈêچ‡‚ج‰^“®•û’ِژ®‚حژںژ®‚ئ‚ب‚éپD
\begin{eqnarray*}
\ddot{\theta} + \frac{2k}{3m}\theta =0
\end{eqnarray*}
2) ƒچپ[ƒ‰پ[‚ھ–تڈم‚ً‚·‚ׂéڈêچ‡
پ@‚±‚جڈêچ‡پCگعگG“_A‚ة”گ¶‚·‚é–ت‚ئ•½چs‚ب•ûŒü‚ج—حپi–€ژC—حپj‚ً’è‹`‚·‚é•K—v‚ھ‚ ‚éپD
پ@‚±‚±‚إپC‚·‚ׂè—ت‚حپC
\begin{eqnarray*}
s=x-R\theta
\end{eqnarray*}
‚إ‚ ‚èپCˆê”ت‚ة–€ژC—ح‚حپC‚·‚ׂ葬“x$\dot{x}$‚جٹضگ”‚ئ‚µ‚ؤ’è‹`‚³‚ê‚éپD–€ژC—ح‚ة‘خ‰‚·‚éˆê”ت—ح‚ً$f_s$‚ئ‚·‚é‚ئپC‘خ‰‚·‚鉼‘z•دˆت‚ح
\begin{eqnarray*}
\delta s=\delta x-R\delta\theta
\end{eqnarray*}
‚ئ‚ب‚é‚ج‚إپC–€ژC—ح‚ة‚و‚鉼‘zژdژ–‚حژں‚ج‚و‚¤‚ة‚ب‚éپD
\begin{eqnarray*}
\delta W_s =f_s\delta s=f_x\delta x-Rf_x\delta\theta = \sum^kQ_k^(s)\delta q_k
\end{eqnarray*}
‘¦‚؟پC$x$پC$\theta$‚ًˆê”تچہ•W‚ئ‚·‚é‚ئپC‘خ‰‚·‚éˆê”ت—ح‚ح
\begin{eqnarray*}
\left.\begin{array}{l}
Q_x = f_s \\
Q_\theta = -Rf_x
\end{array}\right\}
\end{eqnarray*}
‚±‚جڈêچ‡‚جƒ‰ƒOƒ‰ƒ“ƒWƒ…ٹضگ”‚حپC
\begin{eqnarray*}
L=T-U = \frac{1}{2}m\dot{x}^2 + \frac{1}{2}\left(\frac{1}{2}mR^2\right)\dot{\theta}^2-\frac{1}{2}kx^2
\end{eqnarray*}
‚إ‚ ‚èپC
\begin{eqnarray*}
&& \frac{\partial L}{\partial\dot{x}}=m\dot{x}\text{ , }\frac{\partial L}{\partial x} = - kx\quad \therefore \frac{d}{dt}\left(m\dot{x}\right) + kx = f_s \\
&& \frac{\partial L}{\partial\dot{\theta}} = \frac{1}{2}mR^2\dot{\theta}\text{ , }\frac{\partial L}{\partial\theta}=0\quad \therefore \frac{d}{dt}\left(\frac{1}{2}mR^2\dot{\theta}\right) = -Rf_s
\end{eqnarray*}
‚و‚ء‚ؤپC‚±‚جڈêچ‡‚جŒn‚ج•û’ِژ®‚حژں‚ج‚و‚¤‚ة‚ب‚éپD
\begin{eqnarray*}
\left.\begin{array}{l}
m\ddot{x} + kx = f_s \\
\frac{1}{2}mR^2\ddot{\theta} = -Rf_s
\end{array}\right\}
\end{eqnarray*}
10.2 ˆê”تچہ•W‚جژو‚è•û
گ}10-2پ@ژ؟—ت‚ج–³ژ‹‚إ‚«‚éچ„‘ج–_‚إŒq‚ھ‚ꂽ‚Qژ؟“_‚ج‰^“®
پ@
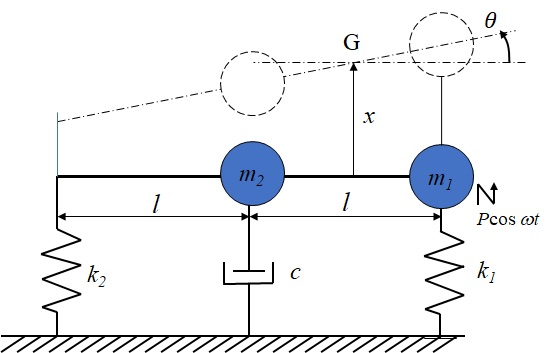
‰‰ڈK‰غ‘è‚إچl‚¦‚½گ}10.2‚ةژ¦‚·پC“ٌ‚آ‚جژ؟—ت$m_1$پC$m_2$‚ھژ؟—ت‚ج–³ژ‹‚إ‚«‚é’·‚³$2l$‚جچ„‘ج–_‚ةژو•t‚¯‚ç‚êˆê‘ج‚ئ‚ب‚ء‚ؤ‚¢‚éŒn‚ج–ت“à‰^“®‚ًچl‚¦‚éپD“ٌ‚آ‚جژ؟—ت‚حٹشٹu$l$‚إژو‚è•t‚¯‚ç‚ê‚ؤ‚¨‚èپC•¨‘ج‚ج—¼’[‚إ‚ ‚éژ؟—ت$m_1$‚جˆت’u‚ئچ„‘ج–_‘¼’[‚ح‚»‚ꂼ‚ê‚خ‚ث’èگ”$k_1$پC$k_2$‚ج‚خ‚ث‚إژxژ‚³‚ê‚ؤ‚¢‚éپD‚ـ‚½پCژ؟—ت$m_2$‚جˆت’u‚ح”Sگ«Œ¸گٹ’èگ”$c$‚جƒ_ƒbƒVƒ…ƒ|ƒbƒg‚إژxژ‚³‚ê‚ؤ‚¨‚èپCژ؟—ت$m_1$‚جˆت’u‚ةگU•$P$ پDٹpژü”gگ”$\omega$‚جژüٹْ“I‚ب‹گ§‰ءگU—ح‚ھچى—p‚µ‚ؤ‚¢‚éپD‚±‚جŒn‚جڈdگSˆت’u‚جڈم‰؛•ûŒü•دˆت‚ً$x$پCڈdگS‰ٌ‚è‚ج‰ٌ“]ٹp•دˆت$\theta$‚ً—p‚¢‚ؤپCLagrange•û’ِژ®‚ً—p‚¢‚ؤŒn‚ج‰^“®•û’ِژ®‚ً‹پ‚ك‚éپD‚±‚±‚إ‰ٌ“]ٹp•دˆت‚حپC”½ژŒv‰ٌ‚è‚ًگ³‚ئ‚·‚éپD
پ@‚±‚جŒn‚جڈdگSˆت’u‚ح$m_2$‚ج‰E•ûŒü‚ة
\begin{eqnarray*}
l_{Gr}=\frac{m_1}{m_1+m_2}l
\end{eqnarray*}
$m_1$‚©‚炾‚ئچ¶•ûŒü‚ة
\begin{eqnarray*}
l_{Gl}=\frac{m_22}{m_1+m_2}l
\end{eqnarray*}
‚إ‚ ‚éپD‚و‚ء‚ؤپC‚±‚ج$l_{Gr}$پC$l_{Gl}$‚ً—p‚¢‚ؤپC”÷ڈ¬•دŒ`‚ً‰¼’肵‚ؤپC$m_1$‚ئ$m_2$‚جگ‚’¼•ûŒü•دˆت‚ً•\‚ي‚·‚ئ
\begin{eqnarray*}
&& m_1\text{: }x+l_{Gr}\sin\theta \fallingdotseq x + l_{Gr}\theta \\
&& m_2\text{: }x-l_{Gl}\sin\theta\fallingdotseq x-l_{Gl}\theta
\end{eqnarray*}
‚ـ‚½پC$k_2$•”‚ج‚خ‚ث‚جگL‚ر‚ح
\begin{eqnarray*}
x-\left(l+l_{Gl}\right)\sin\theta \fallingdotseq x - \left(l+l_{Gl}\right)\theta
\end{eqnarray*}
چX‚ةپC‘Sژ؟—ت‚ً$M=m_1+m_2$پCڈdگS‰ٌ‚è‚جٹµگ«ƒ‚پ[ƒپƒ“ƒg‚ً$I_G=m_1l_{Gr}^2+m_2l_{Gl}^2$‚ئ’u‚‚±‚ئ‚ة‚·‚éپD‚و‚ء‚ؤپC‚±‚جŒn‚ج‰^“®ƒGƒlƒ‹ƒMپ[$T$‚حپCڈdگS‚ج•ہگi‰^“®‚ئڈdگS‰ٌ‚è‚ج‰ٌ“]‰^“®‚جکa‚ئ‚ب‚é‚ج‚إپCژںژ®‚ئ‚ب‚éپD
\begin{eqnarray*}
T=\frac{1}{2}M\dot{x}^2 + \frac{1}{2}I_G\dot{\theta}^2
\end{eqnarray*}
ˆê•ûپC‚±‚جŒn‚جƒ|ƒeƒ“ƒVƒƒƒ‹ƒGƒlƒ‹ƒMپ[$U$‚حپC
\begin{eqnarray*}
U=\frac{1}{2}k_1\left(x + l_{Gr}\theta\right)^2 + \frac{1}{2}k_2\left\{x + \left(l+l_{Gr}\right)\theta\right\}^2
\end{eqnarray*}
‚ـ‚½پCژUˆيٹضگ”$D$‚حپC
\begin{eqnarray*}
D=\frac{1}{2}c\left\{\frac{d}{dt}\left(x - l_{Gl}\theta\right)\right\}^2 = \frac{1}{2}c\left(\dot{x}-l_{Gl}\dot{\theta}\right)^2
\end{eqnarray*}
‚±‚±‚إپCƒ‰ƒOƒ‰ƒ“ƒWƒ…•û’ِژ®‚حپC$L=T-U$پC$D$پCˆê”تچہ•W$q_k$پCˆê”ت—ح$Q_k$‚ً—p‚¢‚ؤژںژ®‚إ•\‚ي‚³‚ê‚éپD
\begin{eqnarray*}
\frac{d}{dt}\left(\frac{\partial L}{\partial\dot{q}_k}\right) - \frac{\partial L}{\partial q_k}+\frac{\partial D}{\partial\dot{q}_k} = Q_k
\end{eqnarray*}
‚و‚ء‚ؤپC$q_1=x$پC$q_2=\theta$‚ئژو‚é‚ئپC‰¼‘zژdژ–$\delta W$‚حپC‰ءگU—ح$P\cos\omega t$‚ھچى—p‚µ‚ؤ‚¢‚éڈêڈٹ‚ج‰¼‘z•دˆت‚ھ$\delta x + l_{Gr}\delta\theta$‚ئ‚ب‚é‚ج‚إپC
\begin{eqnarray*}
\delta W = P\cos\omega t\times\left(\delta x + l_{Gr}\delta\theta\right) = Q_x\delta x + Q_\theta\delta \theta
\end{eqnarray*}
‚ج‚و‚¤‚ة•\‚·‚±‚ئ‚ھ‚إ‚«‚éپD‚و‚ء‚ؤپC
\begin{eqnarray*}
\frac{\partial L}{\partial\dot{x}}=M\dot{x}\text{ , }\frac{\partial L}{\partial x}= -k_1\left(x+l_{Gr}\theta\right)-k_2\left\{x-\left(l+l_{Gl}\right)\theta\right\}\text{ , }\frac{\partial D}{\partial\dot{x}}=c\left(\dot{x}-l_{Gl}\dot{\theta}\right)
\end{eqnarray*}
‚و‚è
\begin{eqnarray*}
&& \frac{d}{dt}\left(M\dot{x}\right) + k_1\left(x+l_{Gr}\theta\right) + k_2\left\{x-\left(l+l_{Gl}\right)\theta\right\} + c\left(\dot{x}-l_{Gl}\dot{\theta}\right) = P\cos\omega t \\
&& \therefore M\ddot{x} + c\dot{x} -cl_{Gl}\dot{\theta} + \left(k_1+k_2\right)x + \left\{k_1l_{Gr}-k_2\left(l+l_{Gl}\right)\right\}\theta = P\cos\omega t
\end{eqnarray*}
“¯—l‚ةپC
\begin{eqnarray*}
\frac{\partial L}{\partial\dot{\theta}}=I_G\dot{\theta}\text{ , }\frac{\partial L}{\partial\theta}= -k_1l_{Gr}\left(x+l_{Gr}\theta\right)+k_2\left(l+l_{Gr}\right)\left\{x-\left(l+l_{Gl}\right)\theta\right\}\text{ , }\frac{\partial D}{\partial\dot{\theta}}=-cl_{Gl}\left(\dot{x}-l_{Gl}\dot{\theta}\right)
\end{eqnarray*}
‚و‚è
\begin{eqnarray*}
&& \frac{d}{dt}\left(I_G\dot{\theta}\right) + k_1l_{Gr}\left(x+l_{Gr}\theta\right) - k_2\left(l+l_{Gr}\right)\left\{x-\left(l+l_{Gl}\right)\theta\right\} - cl_{Gl}\left(\dot{x}-l_{Gl}\dot{\theta}\right) = l_{Gr}P\cos\omega t \\
&& \therefore I_G\ddot{\theta} - cl_{Gl}\dot{x} + cl_{Gl}^2\dot{\theta} + \left\{k_1l_{Gr} - k_2\left(l+l_{Gr}\right)\right\}x + \left\{k_1l_{Gr}^2 + k_2\left(l+l_{Gl}\right)^2\right\}\theta = l_{Gr}P\cos\omega t
\end{eqnarray*}
10.3 ‰‰ڈK
گ}10.3‚ةژ¦‚·‚و‚¤‚ةپCژ؟—ت$m$پC”¼Œa$r$‰~’Œ‚ھ”¼Œa𝑅‚ج‰~“›–ت‚ًژ‚آژ؟—ت$M$‚ج‘نڈم‚ً‚·‚ׂ炸‰Eگ}‚ج‚و‚¤‚ة‚±‚ë‚ھ‚èگU“®‚·‚éپD‘ن‚ح‚خ‚ث’èگ”$k$‚إ‘¼’[‚ًژxژ‚³‚ê‚ؤ‚¨‚èپCٹٹ‚ç‚©‚ةگ…•½–ت“à‚ً“®‚‚±‚ئ‚ھ‚إ‚«‚éپD
(1) ‰^“®ƒGƒlƒ‹ƒMپ[$T$‚ً‹پ‚ك‚وپD
(2) ƒ|ƒeƒ“ƒVƒƒƒ‹ƒGƒlƒ‹ƒMپ[$U$‚ً‹پ‚ك‚وپD
(3) Lagrange•û’ِژ®‚ً—p‚¢‚ؤ‰^“®•û’ِژ®‚ً“±ڈo‚¹‚وپD
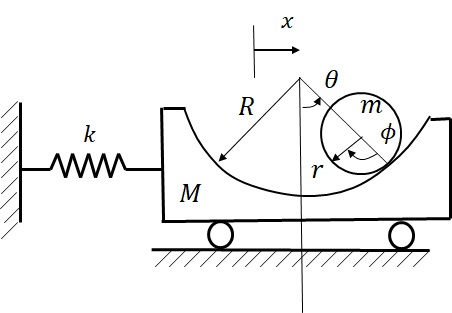
گ}10-3پ@‰~“›–ت‚ً“]‚ھ‚é‰~’Œ‚ئ‘ن‚ج‰^“®
پ@