�R�D�e���͊w�ɂ�����L���v�f�莮��
3.1 �P�������
3.1.1 �d�ݕt�c���@�Ɋ�Â��莮��
�_����̏c�U�����ł���P�������͖��ɑ��ėL���v�f�@��K�p���C��b��������U������D�P�����k�E�����ɑ����b�������́C�������ψʂ�$u$�Ƃ���ƁC
\begin{eqnarray*}
\frac{\partial\sigma_{xx}}{\partial x} - \rho\frac{\partial^2u}{\partial t^2} =0
\end{eqnarray*}
�ł���C���z�ψ�$\delta u$���d�݊��Ƃ���d�ݕt�c���\���͎��̂悤�ɕ\�킷���Ƃ��ł���D
\begin{equation}
\int_x\int_y\int_z\left(\frac{\partial\sigma_{xx}}{\partial x} - \rho\frac{\partial^2u}{\partial t^2}\right)\delta udxdydz=0 \label{eqn:332}
\end{equation}
����ɁC$x=x_k$($k=0$, $1$, $2$, $\ldots$)�̈ʒu�ɏW���d$f_k\left(t\right)$����p����ꍇ�ɂ́CDirac�̃f���^��$\delta\left(x\right)$��p���āC���̂悤�ɕ\�����邱�Ƃ��ł���D
\begin{equation}
\int_x\int_y\int_z\left\{\frac{\partial \sigma_{xx}}{\partial x} - \rho\frac{\partial^2 u}{\partial t^2} + \sum_kf_k\left(t\right)\delta\left(x-x_k\right)\delta\left(y\right)\delta\left(z\right)\right\}\delta udxdydz=0 \label{eqn:333}
\end{equation}
���̎��̍��ӑ�P�����ϕ����C���̂悤�ɕό`����D
\begin{eqnarray*}
\int_y\int_z\left[\sigma_{xx}\delta u\right]_xdydz -\int_x\int_y\int_z\sigma_{xx}\frac{\partial\delta u}{\partial x}dxdydz - \int_x\int_y\int_z\rho\frac{\partial^2 u}{\partial t^2}\delta udxdydz = \int_x\sum_kf_k\left(t\right)\delta\left(x-x_k\right)\delta u dx
\end{eqnarray*}
���E�����������ɖ�������Ă���Ƃ���ƁC��P���͗�ƂȂ�D���́C�ψʂ��x�N�g���ŕ\�������ꍇ�ɂ́C���̐ς͓��ςƂȂ�̂Ŏ����̂悤��$\delta u$�̓]�u��������|����`���ŕ\�킷���Ƃ��ł���D
\begin{equation}
\int_x\int_y\int_z\left(\frac{\partial\delta u}{\partial x}\right)^T\sigma_{xx}dxdydz + \int_x\int_y\int_z\delta u^T\rho\frac{\partial^2u}{\partial t^2}dxdydz= \int_x\delta u^T\sum_kf_k\left(t\right)\delta\left(x-x_k\right)dx \label{eqn:333a}
\end{equation}
�����ŁC���́]�c�݊W��
\begin{eqnarray*}
\sigma_{xx} = E\varepsilon_{xx}
\end{eqnarray*}
�ł���C�c�]�ψʂ̊W��
\begin{eqnarray*}
\varepsilon_{xx} = \frac{\partial u}{\partial x}
\end{eqnarray*}
�ł���D
�@
�@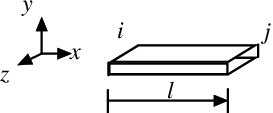
�} 3.1 Finite element of a bar
�@
�@�}3.1�Ɏ����悤�ɁC��͑Ώۂł���_�C���邢�́C���̈ꕔ�̗L���ȗv�f�����o���D�v�f������$l$�Ƃ��C�v�f���[��ߓ_�Ƃ��āC�ߓ_�ԍ�$i$�ԁC$j$�Ԃ�t����D�e�ߓ_�ɂ����鎲�����ψʂ�$u_i$�C$u_j$�Ƃ��C�Ǐ����W�n$xyz$���l����D�e�ߓ_�ɂ����ẮC��p����p�̖@���ɂ����͂��������Ă���C$i$�_�ł́C$-x$�������̗�$f_i$�C$j$�_�ł́C$x$�������̗�$f_j$�����̗v�f�ɑ��č�p���C���̔��͂��ׂ荇���ʂ̗v�f�ɍ�p���Ă���C�ƍl����D���ɁC�v�f����$x$����̔C�ӓ_�̕ψ�$u$��K���Ȋ��ŕ�ԁi�ߎ��j����D�Ⴆ�C�ꎟ�������肷��Ǝ��̂悤�ɕ\���ł���D
\begin{equation}
u = u\left(x, t\right) = \left(1-\frac{x}{l}\right)u_i\left(t\right) + \frac{x}{l}u_j\left(t\right)
= \left\{\begin{array}{cc} 1-\frac{x}{l} & \frac{x}{l}\end{array}\right\}\left\{\begin{array}{c} u_i\left(t\right) \\ u_j\left(t\right) \end{array}\right\}
= \mathbf{N}\left(x\right)\left\{\begin{array}{c} u_i\left(t\right) \\ u_j\left(t\right) \end{array}\right\} \label{eqn:3001}
\end{equation}
�����ŁC$\mathbf{N}\left(x\right)$�́C�`����ƌĂ��D���̑�P�ϕ��C���邢�́C���z�d��$\delta u$�́C
\begin{equation}
\delta u = \left(1-\frac{x}{l}\right)\delta u_i + \frac{x}{l}\delta u_j
= \left\{\begin{array}{cc} 1-\frac{x}{l} & \frac{x}{l}\end{array}\right\}\left\{\begin{array}{c} \delta u_i \\ \delta u_j \end{array}\right\}
= N\left(x\right)\left\{\begin{array}{c} u_i\left(t\right) \\ u_j\left(t\right) \end{array}\right\} \label{eqn:3002}
\end{equation}
�ƕ\���ł���D�܂��C�c�Ɋւ��āC$L=\frac{\partial}{\partial x}$�Ƃ��āC
\begin{eqnarray*}
\varepsilon_{xx} = Lu = \frac{\partial u}{\partial x} = \left\{\begin{array}{cc} -\frac{1}{l} & \frac{1}{l}\end{array}\right\}
\left\{\begin{array}{c} u_i\left(t\right) \\ u_j\left(t\right) \end{array}\right\}= \mathbf{B}\left\{\begin{array}{c} u_i\left(t\right) \\ u_j\left(t\right) \end{array}\right\}
\end{eqnarray*}
���l�ɁC�ψʐ����̑�P�ϕ��́C
\begin{eqnarray*}
\frac{\partial\delta u}{\partial x} = \left\{\begin{array}{cc} -\frac{1}{l} & \frac{1}{l}\end{array}\right\}
\left\{\begin{array}{c} \delta u_i \\ \delta u_j \end{array}\right\}=\mathbf{B}\left\{\begin{array}{c} \delta u_i \\ \delta u_j \end{array}\right\}
\end{eqnarray*}
����āC��(\ref{eqn:333a})�E�ӑ�P���͎��̂悤�ɂȂ�D
\begin{eqnarray*}
\int_x\int_y\int_z\left(\frac{\partial\delta u}{\partial x}\right)^T\sigma_{xx}dxdydz &=& \int_x\int_y\int_z\left(\frac{\partial\delta u}{\partial x}\right)^TE\frac{\partial u}{\partial x}dxdydz \\
&=&\left\{\begin{array}{cc} \delta u_i & \delta u_j \end{array}\right\}\int_0^l\mathbf{B}^TEA\mathbf{B}dx\left\{\begin{array}{c} u_i \\ u_j \end{array}\right\} \\
&=& \left\{\begin{array}{cc} \delta u_i & \delta u_j \end{array}\right\}\int_0^lEA
\left\{\begin{array}{c} -\frac{1}{l} \\ \frac{1}{l}\end{array}\right\}
\left\{\begin{array}{cc} -\frac{1}{l} & \frac{1}{l}\end{array}\right\}dx
\left\{\begin{array}{c} u_i \\ u_j \end{array}\right\} \\
&=&\left\{\begin{array}{cc} \delta u_i & \delta u_j \end{array}\right\}\int_0^lEA
\left[\begin{array}{cc} \frac{1}{l^2} & -\frac{1}{l^2} \\
-\frac{1}{l^2} & \frac{1}{l^2}\end{array} \right]dx
\left\{\begin{array}{c} u_i\left(t\right) \\ u_j\left(t\right) \end{array}\right\} \\
&=&\left\{\begin{array}{cc} \delta u_i & \delta u_j \end{array}\right\}
\left[\begin{array}{cc} \frac{EA}{l} & -\frac{EA}{l} \\
-\frac{EA}{l} & \frac{EA}{l}\end{array} \right]
\left\{\begin{array}{c} u_i\left(t\right) \\ u_j\left(t\right) \end{array}\right\}
=\left\{\begin{array}{cc} \delta u_i & \delta u_j \end{array}\right\}
\mathbf{K}_{ij}\left\{\begin{array}{c} u_i\left(t\right) \\ u_j\left(t\right) \end{array}\right\}
\end{eqnarray*}
�����ŁC�v�f���ɂ�����$EA$�͈��Ƃ��Ă���C$D=EA$�Ƃ����ƁC
\begin{eqnarray*}
\mathbf{K}_{ij}=\int_0^l\mathbf{B}^TD\mathbf{B}dx = \left[\begin{array}{cc} \frac{EA}{l} & -\frac{EA}{l} \\
-\frac{EA}{l} & \frac{EA}{l}\end{array} \right]\text{, }A= \int_y\int_z dydz
\end{eqnarray*}
�́C���ꂼ��C�v�f�����s��C�f�ʐςł���D����C�����x�͎��̂悤�ɂȂ�D
\begin{eqnarray*}
\frac{\partial^2u}{\partial t^2} = \left\{\begin{array}{cc} 1-\frac{x}{l} & \frac{x}{l}\end{array}\right\}\left\{\begin{array}{c} \frac{d^2 u_i\left(t\right)}{dt^2} \\ \frac{du_j\left(t\right)}{dt^2} \end{array}\right\} = N\left(x\right)\left\{\begin{array}{c} \frac{du_i\left(t\right)}{dt^2} \\ \frac{d^2 u_j\left(t\right)}{dt^2} \end{array}\right\}
\end{eqnarray*}
����āC��(\ref{eqn:333a})�E�ӑ�Q���͎��̂悤�ɂȂ�D
\begin{eqnarray*}
\int_x\int_y\int_z\delta u^T\rho\frac{\partial^2u}{\partial t^2}dxdydz &=& \left\{\begin{array}{cc} \delta u_i & \delta u_j \end{array}\right\}\int_0^l\mathbf{N}\left(x\right)^T\rho A\mathbf{N}\left(x\right)dx\left\{\begin{array}{c} \frac{d^2u_i\left(t\right)}{dt^2} \\ \frac{d^2u_j\left(t\right)}{dt^2} \end{array}\right\} \\
&=& \left\{\begin{array}{cc} \delta u_i & \delta u_j \end{array}\right\}\int_0^l\left\{\begin{array}{c} 1-\frac{x}{l} \\ \frac{x}{l}\end{array}\right\}\rho A\left\{\begin{array}{cc} 1-\frac{x}{l} & \frac{x}{l}\end{array}\right\}dx\left\{\begin{array}{c} \frac{d^2u_i\left(t\right)}{dt^2} \\ \frac{d^2u_j\left(t\right)}{dt^2} \end{array}\right\} \\
&=& \left\{\begin{array}{cc} \delta u_i & \delta u_j \end{array}\right\}\int_0^l\rho A\left[\begin{array}{cc} \left(1-\frac{x}{l}\right)^2 & \frac{x}{l}\left(1-\frac{x}{l}\right)\\
\frac{x}{l}\left(1-\frac{x}{l}\right) & \left(\frac{x}{l}\right)^2 \end{array}\right]dx
\left\{\begin{array}{c} \frac{d^2u_i\left(t\right)}{dt^2} \\ \frac{du_j\left(t\right)}{dt^2} \end{array}\right\}\\
&=& \left\{\begin{array}{cc} \delta u_i & \delta u_j \end{array}\right\}\rho A\left[\begin{array}{cc} \frac{l}{3} & \frac{l}{6} \\
\frac{l}{6} & \frac{l}{3} \end{array}\right]
\left\{\begin{array}{c} \frac{d^2u_i\left(t\right)}{dt^2} \\ \frac{d^2u_j\left(t\right)}{dt^2} \end{array}\right\} = \left\{\begin{array}{cc} \delta u_i & \delta u_j \end{array}\right\}\mathbf{M}_{ij}\left\{\begin{array}{c} \frac{d^2u_i\left(t\right)}{dt^2} \\ \frac{d^2u_j\left(t\right)}{dt^2} \end{array}\right\}
\end{eqnarray*}
�����ŁC�v�f���ɂ�����$\rho A$�͈��Ƃ��Ă���C
\begin{eqnarray*}
\mathbf{M}_{ij}=\left[\begin{array}{cc} \frac{\rho Al}{3} & \frac{\rho Al}{6} \\
\frac{\rho Al}{6} & \frac{\rho Al}{3} \end{array}\right]
\end{eqnarray*}
�͗v�f���ʍs��ł���D���̂悤�ɁC�`���$\mathbf{N}\left(x\right)$��p���āC���߂�ꂽ���ʍs���consistent mass matrix�ƌĂяꍇ������D����ɑ��āCLamped mass matrix�ƌĂԁC�Ίp�����̂ݒl�������ʍs���p���ĉ�͂��s���ꍇ������D�e�v�f�̘a���C�L���v�f�̎���$\rho Al$�ƂȂ�̂ŁC���̏ꍇ��Lamped mass matrix�́C
\begin{eqnarray*}
\mathbf{M}_{ij}=\left[\begin{array}{cc} \frac{\rho Al}{2} & 0 \\
0 & \frac{\rho Al}{2} \end{array}\right]
\end{eqnarray*}
�ƂȂ�D
�@���͂��l���������̂悤�ȕ����������߂邱�Ƃ��ł���D
\begin{eqnarray*}
\left\{\begin{array}{cc} \delta u_i & \delta u_j \end{array}\right\}\left(\mathbf{K}_{ij}\left\{\begin{array}{c} u_i\left(t\right) \\ u_j\left(t\right) \end{array}\right\}
+ \mathbf{M}_{ij}\left\{\begin{array}{c} \frac{d^2u_i\left(t\right)}{dt^2} \\ \frac{d^2u_j\left(t\right)}{dt^2} \end{array}\right\}
- \left\{\begin{array}{c} -f_i\left(t\right) \\ f_j\left(t\right) \end{array}\right\}
\right)=0
\end{eqnarray*}
���������āC�e�L���ȗv�f�ɑ��āC���̊W���������Ă��邱�ƂɂȂ�D
\begin{eqnarray}
\mathbf{M}_{ij}\left\{\begin{array}{c} \frac{d^2u_i\left(t\right)}{dt^2} \\ \frac{d^2u_j\left(t\right)}{dt^2} \end{array}\right\}+ \mathbf{K}_{ij}\left\{\begin{array}{c} u_i\left(t\right) \\ u_j\left(t\right) \end{array}\right\} = \left\{\begin{array}{c} -f_i\left(t\right) \\ f_j\left(t\right) \end{array}\right\} \label{eqn:334}
\end{eqnarray}
���̗v�f�ƂȂ����Ă��闼�[�̗v�f�Ɋւ��Ă����l�̊W���������Ă���C�ߓ_�ԍ�$i$�ԑ��ɑ��ẮC
\begin{eqnarray}
\mathbf{M}_{li}\left\{\begin{array}{c} \frac{d^2u_l\left(t\right)}{dt^2} \\ \frac{d^2u_i\left(t\right)}{dt^2} \end{array}\right\}+ \mathbf{K}_{li}\left\{\begin{array}{c} u_l\left(t\right) \\ u_i\left(t\right) \end{array}\right\} = \left\{\begin{array}{c} -f_l\left(t\right) \\ f_i\left(t\right) \end{array}\right\} \label{eqn:335}
\end{eqnarray}
�܂��C�ߓ_�ԍ�$j$�ԑ��ɑ��ẮC
\begin{eqnarray}
\mathbf{M}_{jk}\left\{\begin{array}{c} \frac{d^2u_j\left(t\right)}{dt^2} \\ \frac{d^2u_k\left(t\right)}{dt^2} \end{array}\right\}+ \mathbf{K}_{jk}\left\{\begin{array}{c} u_j\left(t\right) \\ u_k\left(t\right) \end{array}\right\} = \left\{\begin{array}{c} -f_j\left(t\right) \\ f_k\left(t\right) \end{array}\right\} \label{eqn:336}
\end{eqnarray}
�ł���D����āC�v�f�S�̂ōl���Ă���ߓ_�ԍ��ɑΉ������ߓ_�ψ�$u_i$��v�f�Ƃ���ߓ_�ψʃx�N�g��$\mathbf{u}\left(t\right)$�����C����ɑΉ�����`�œ��͂��ł����������悤�ɁC�����̕����������Z���邱�Ƃɂ��C���̂悤�Ȗ_�C���邢�́C���S�̂Ɋւ����b�����������߂邱�Ƃ��ł���D
\begin{eqnarray*}
\mathbf{M}\frac{d^2\mathbf{u}\left(t\right)}{dt^2} + \mathbf{K}\mathbf{u}\left(t\right) = \mathbf{f}_{0N}\left(t\right)
\end{eqnarray*}
�����ŁC
\begin{eqnarray*}
\mathbf{f}_{0N}\left(t\right)=\left\{\begin{array}{cccc} -f_0\left(t\right), & 0 &, \ldots, & f_N\left(t\right) \end{array}\right\}^T
\end{eqnarray*}
�ł���C���[���S������Ă��Ȃ��ꍇ�́C���͂��������Ȃ��̂ŗ�x�N�g���ƂȂ�D�S�����Ă���ꍇ�́C����ɑΉ��������͂��������Ă��邱�ƂɂȂ�C�l�́C���E�̍S����Ԃɂ���Ē�߂���D�ψʃx�N�g��$\mathbf{u}\left(t\right)$�́C�v�f����N�Ƃ���ƁC�ߓ_����N+1�ƂȂ莟�̂悤�Ȍ`���ƂȂ�D
\begin{eqnarray*}
\mathbf{u}\left(t\right)=\left\{\begin{array}{cccc} u_0\left(t\right), & u_1\left(t\right) & \ldots, & u_N\left(t\right)\end{array}\right\}^T
\end{eqnarray*}
�e�ߓ_�ɉ����O�̓x�N�g��$\mathbf{f}\left(t\right)$�����݂���ꍇ�́C���[���܂ߎ��̌`���ŕ\������D
\begin{eqnarray*}
\mathbf{f}\left(t\right)=\left\{\begin{array}{cccc} f_0\left(t\right), & f_1\left(t\right) & \ldots, & f_N\left(t\right)\end{array}\right\}^T
\end{eqnarray*}
�����C�e������Ή�����ߓ_�ɉ����͂ƌ��Ȃ����Ƃɂ��C������������D
\begin{eqnarray*}
\mathbf{M}\frac{d^2\mathbf{u}\left(t\right)}{dt^2} + \mathbf{K}\mathbf{u}\left(t\right) = \mathbf{f}\left(t\right)
\end{eqnarray*}
�ȏ�̓��o���@�́C��(\ref{eqn:332})�C���邢�́C��(\ref{eqn:333})�ɂ����āC�̈���̎x�z�i�����j��������
\begin{eqnarray*}
&& \frac{\partial\sigma_{xx}}{\partial x} - \rho\frac{\partial^2u}{\partial t^2} =0 \\
&& \frac{\partial\sigma_{xx}}{\partial x} - \rho\frac{\partial^2u}{\partial t^2} + \sum_kf_k\left(t\right)\delta\left(x-x_k\right)\delta\left(y\right)\delta\left(z\right) = 0
\end{eqnarray*}
���ŋߎ��������߂ɐ�����덷�i�c���j
\begin{eqnarray*}
&& \epsilon_1 = \frac{\partial\sigma_{xx}}{\partial x} - \rho\frac{\partial^2u}{\partial t^2} \\
&& \epsilon_2 = \frac{\partial\sigma_{xx}}{\partial x} - \rho\frac{\partial^2u}{\partial t^2} + \sum_kf_k\left(t\right)\delta\left(x-x_k\right)\delta\left(y\right)\delta\left(z\right)
\end{eqnarray*}
���ɂ���悤�ȊW�����C�d�݊�$\delta u=w$�������C�̈�$\Omega$�Ɋւ���ϕ�
\begin{eqnarray*}
&& \int_{\Omega}\epsilon_1 w d\Omega = 0 \\
&& \int_{\Omega}\epsilon_2 w d\Omega = 0
\end{eqnarray*}
�����s���邱�Ƃɂ�苁�߂�C�Ƃ����l�����ł���D
3.1.2 �G�l���M�[�����Ɋ�Â��莮��
�G�l���M�[�����ł���Hamilton�̌�����Lagrange�̕�������p���ėL���v�f�@�̒莮�����\�ł���D�O�Ɠ��l�ɐ}�R�Ɏ����悤�ɁC��͑Ώۂł���_�C���邢�́C���̈ꕔ�̒���$l$�̗L���ȗv�f���l����D����ɑ���^���G�l���M�[$E_T^{ij}$�́C
\begin{eqnarray*}
2E_T^{ij} = \int_x\int_y\int_z\rho\left(\frac{\partial u}{\partial t}\right)^2dxdydz = \int_x\int_y\int_z\rho\left(\frac{\partial u}{\partial t}\right)^T\left(\frac{\partial u}{\partial t}\right)dxdydz = \int_x\rho A\left(\frac{\partial u}{\partial t}\right)^T\left(\frac{\partial u}{\partial t}\right)dx
\end{eqnarray*}
�ł���C��(\ref{eqn:3001})���C
\begin{equation}
\frac{\partial u}{\partial t} = \left\{\begin{array}{cc} 1-\frac{x}{l} & \frac{x}{l}\end{array}\right\}\left\{\begin{array}{c} \frac{du_i\left(t\right)}{dt} \\ \frac{du_j\left(t\right)}{dt} \end{array}\right\}=\mathbf{N}\left(x\right)\left\{\begin{array}{c} \frac{du_i\left(t\right)}{dt} \\ \frac{du_j\left(t\right)}{dt} \end{array}\right\} \label{eqn:337}
\end{equation}
�ƂȂ�̂ŁC
\begin{eqnarray*}
2E_T^{ij} &=& \left\{\begin{array}{cc} \frac{du_i\left(t\right)}{dt} & \frac{du_j\left(t\right)}{dt} \end{array}\right\}\int_0^l\rho A\mathbf{N}\left(x\right)^T\mathbf{N}\left(x\right)dx\left\{\begin{array}{c} \frac{du_i\left(t\right)}{dt} \\ \frac{du_j\left(t\right)}{dt} \end{array}\right\} \\
&=& \left\{\begin{array}{cc} \frac{du_i\left(t\right)}{dt} & \frac{du_j\left(t\right)}{dt} \end{array}\right\}\int_0^l\rho A\left\{\begin{array}{c} 1-\frac{x}{l} \\ \frac{x}{l}\end{array}\right\}\left\{\begin{array}{cc} 1-\frac{x}{l} & \frac{x}{l}\end{array}\right\}dx\left\{\begin{array}{c} \frac{du_i\left(t\right)}{dt} \\ \frac{du_j\left(t\right)}{dt} \end{array}\right\} \\
&=& \left\{\begin{array}{cc} \frac{du_i\left(t\right)}{dt} & \frac{du_j\left(t\right)}{dt} \end{array}\right\}\int_0^l\rho A\displaystyle{\left[\begin{array}{cc} \left(1-\frac{x}{l}\right)^2 & \frac{x}{l}\left(1-\frac{x}{l}\right) \\
\frac{x}{l}\left(1-\frac{x}{l}\right) & \left(\frac{x}{l}\right)^2 \end{array}\right]}dx\left\{\begin{array}{c} \frac{du_i\left(t\right)}{dt} \\ \frac{du_j\left(t\right)}{dt} \end{array}\right\} \\
&=& \left\{\begin{array}{cc} \frac{du_i\left(t\right)}{dt} & \frac{du_j\left(t\right)}{dt} \end{array}\right\}\displaystyle{\left[\begin{array}{cc} \frac{\rho Al}{3} & \frac{\rho Al}{6} \\
\frac{\rho Al}{6} & \frac{\rho Al}{3} \end{array}\right]}\left\{\begin{array}{c} \frac{du_i\left(t\right)}{dt} \\ \frac{du_j\left(t\right)}{dt} \end{array}\right\} = \left\{\begin{array}{cc} \frac{du_i\left(t\right)}{dt} & \frac{du_j\left(t\right)}{dt} \end{array}\right\}\mathbf{M}_{ij}\left\{\begin{array}{c} \frac{du_i\left(t\right)}{dt} \\ \frac{du_j\left(t\right)}{dt} \end{array}\right\}
\end{eqnarray*}
����C�c�G�l���M�[$E_V^{ij}$�́C
\begin{eqnarray*}
2E_V^{ij} &=& \int_x\int_y\int_z\sigma_{xx}\varepsilon_{xx}dxdydz = \int_x\int_y\int_z\left(\varepsilon_{xx}\right)^TE\varepsilon_{xx}dxdydz \\
&=& \left\{\begin{array}{cc} u_i & u_j \end{array}\right\}
\int_0^l\mathbf{B}^TEA\mathbf{B}dx\left\{\begin{array}{c} u_i \\ u_j \end{array}\right\} \\
&=& \left\{\begin{array}{cc} u_i & u_j \end{array}\right\}
\int_0^lEA\left\{\begin{array}{c} -\frac{1}{l} \\ \frac{1}{l}\end{array}\right\}
\left\{\begin{array}{cc} -\frac{1}{l} & \frac{1}{l}\end{array}\right\}dx
\left\{\begin{array}{c} u_i \\ u_j \end{array}\right\} \\
&=&\left\{\begin{array}{cc} u_i & u_j \end{array}\right\}\int_0^lEA
\left[\begin{array}{cc} \frac{1}{l^2} & -\frac{1}{l^2} \\
-\frac{1}{l^2} & \frac{1}{l^2}\end{array} \right]dx
\left\{\begin{array}{c} u_i\left(t\right) \\ u_j\left(t\right) \end{array}\right\} \\
&=&\left\{\begin{array}{cc} u_i & u_j \end{array}\right\}
\left[\begin{array}{cc} \frac{EA}{l} & -\frac{EA}{l} \\
-\frac{EA}{l} & \frac{EA}{l}\end{array} \right]
\left\{\begin{array}{c} u_i\left(t\right) \\ u_j\left(t\right) \end{array}\right\}
=\left\{\begin{array}{cc} u_i & u_j \end{array}\right\}
\mathbf{K}_{ij}\left\{\begin{array}{c} u_i\left(t\right) \\ u_j\left(t\right) \end{array}\right\}
\end{eqnarray*}
�]���āC��ʍ��W��$u_i$�C$u_j$�C�ߓ_�ɍ�p�������$f_i\left(t\right)$�C$f_j\left(t\right)$����ʗ͂ƌ��Ȃ��CLagrange��
\begin{eqnarray*}
L^{ij} = E_T^{ij} - E_V^{ij}
\end{eqnarray*}
���l����ƁC����Lagrange������
\begin{eqnarray*}
&& \frac{d}{dt}\left(\frac{\partial L^{ij}}{\partial\dot{u}_i}\right) + \frac{\partial L^{ij}}{\partial u_i} = - f_i\left(t\right) \\
&& \frac{d}{dt}\left(\frac{\partial L^{ij}}{\partial\dot{u}_j}\right) + \frac{\partial L^{ij}}{\partial u_j} = f_j\left(t\right)
\end{eqnarray*}
�ɂ��C���̂悤�ȗv�f�ɑ����b�����������߂邱�Ƃ��ł���D
\begin{eqnarray*}
\mathbf{M}_{ij}\left\{\begin{array}{c} \frac{d^2u_i\left(t\right)}{dt^2} \\ \frac{d^2u_j\left(t\right)}{dt^2} \end{array}\right\}+ \mathbf{K}_{ij}\left\{\begin{array}{c} u_i\left(t\right) \\ u_j\left(t\right) \end{array}\right\} = \left\{\begin{array}{c} -f_i\left(t\right) \\ f_j\left(t\right) \end{array}\right\}
\end{eqnarray*}
�O�Ɠ��l�C�ߓ_�ψʃx�N�g��
\begin{eqnarray*}
\mathbf{u}\left(t\right)=\left\{\begin{array}{cccc} u_0\left(t\right), & u_1\left(t\right) & \ldots, & u_N\left(t\right)\end{array}\right\}^T
\end{eqnarray*}
����сC�e�ߓ_�ɉ����O�̓x�N�g��
\begin{eqnarray*}
\mathbf{f}\left(t\right)=\left\{\begin{array}{cccc} f_0\left(t\right), & f_1\left(t\right) & \ldots, & f_N\left(t\right)\end{array}\right\}^T
\end{eqnarray*}
���l���邱�Ƃɂ��C�n�S�̂ɑ��鎟�̂悤�Ȋ�b��������������D
\begin{eqnarray*}
\mathbf{M}\frac{d^2\mathbf{u}\left(t\right)}{dt^2} + \mathbf{K}\mathbf{u}\left(t\right) = \mathbf{f}\left(t\right)
\end{eqnarray*}
�{�莮���ł킩��悤�ɁC���ʍs��ƍ����s��́C�n�̉^���G�l���M�[�C�c�G�l���M�[���߂邱�Ƃɂ�苁�߂邱�Ƃ��ł��C��߂�ꂽ�s��ɂ��C�ߓ_�ψʃx�N�g���ɑ���Q�K�̏�����������`�ŕ\������Ηǂ����Ƃ��킩��D
3.1.3 �v���O���~���O��
�ȏ�̒莮���Ɋ�Â��C�L���v�f�f�[�^��ǂݍ��݁C�S�̎��ʍs��$\mathbf{M}$�C�S�̍����s��$\mathbf{K}$�����߂�v���O�������l����D��{�I�ȗ���������v���O�������ȉ��Ɏ����D�v���O�������ɃR�����g���Ă���悤�ɁC���̂悤�ȗ���Ōv�Z��i�߂Ă���D
3.2 �Q�����e�����
3.2.1 ��Ђ��ݎO�p�`�v�f
�@
�@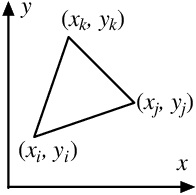
�} 3.2 Finite element of a plane
�@
�@�Q�������ɂ����Ă��l�����́C���l�ŁC��͗̈�����Ē�߂���C�Ⴆ�C�}3.2�Ɏ����悤�ȎO�p�`�`��̗L���ȗv�f�ɐߓ_($x_i$, $y_i$)�C($x_j$, $y_j$)�C($x_k$, $y_k$)���߁C���̗v�f���C�ӓ_�̕ψʂƐߓ_�ψʂ̊W���`�����p���Ē�`���C����-�c�W�C�c�ƕψʂ̊W���g�p����D$xy$���ʂ̖ʓ��ό`�������l����ꍇ�C$x$���C$y$�������ψʂ�$u$�C$v$�Ƃ����ꍇ�C���̂悤�Ɉꎟ���Œu�����Ƃ��ł���i���Ђ��ݗv�f�j�D
\begin{eqnarray*}
\left.\begin{array}{l}
u\left(x, y, t\right) = a_0\left(t\right) + a_1\left(t\right)x + a_2\left(t\right)y \\
v\left(x, y, t\right) = b_0\left(t\right) + b_1\left(t\right)x + b_2\left(t\right)y
\end{array}\right\}
\end{eqnarray*}
�e�ߓ_���W�ɂ�����ψʐ�����($u_i$, $v_i$)�C($u_j$, $v_j$)�C($u_k$, $v_k$)�Ƃ���ƁC
\begin{eqnarray*}
&& \left.\begin{array}{l}
u\left(x_i, y_i, t\right) = u_i\left(t\right) = a_0\left(t\right) + a_1\left(t\right)x_i + a_2\left(t\right)y_i \\
u\left(x_j, y_j,t \right) = u_j\left(t\right) = a_0\left(t\right) + a_1\left(t\right)x_j + a_2\left(t\right)y_j \\
u\left(x_k, y_k,t \right) = u_k\left(t\right) = a_0\left(t\right) + a_1\left(t\right)x_k + a_2\left(t\right)y_k
\end{array}\right\} \\
&& \left.\begin{array}{l}
v\left(x_i, y_i, t\right) = v_i\left(t\right) = b_0\left(t\right) + b_1\left(t\right)x_i + b_2\left(t\right)y_i \\
v\left(x_j, y_j, t\right) = v_j\left(t\right) = b_0\left(t\right) + b_1\left(t\right)x_j + b_2\left(t\right)y_j \\
v\left(x_k, y_k, t\right) = v_k\left(t\right) = b_0\left(t\right) + b_1\left(t\right)x_k + b_2\left(t\right)y_k
\end{array}\right\}
\end{eqnarray*}
�����ŁC$a_i\left(t\right)$, $b_i\left(t\right)$($i=0$, $1$, $2$)�́C�ߓ_���W�Ɛߓ_�ψʂŎ��̂悤�ɒ�߂邱�Ƃ��ł���D�܂��C�s��\�������
\begin{eqnarray*}
&& \left\{\begin{array}{c} u_i\left(t\right) \\ u_j\left(t\right) \\ u_k\left(t\right) \end{array}\right\}
=\left[\begin{array}{ccc}
1 & x_i & y_i \\
1 & x_j & y_j \\
1 & x_k & y_k \end{array}\right]
\left\{\begin{array}{c} a_0\left(t\right) \\ a_1\left(t\right) \\ a_2\left(t\right)
\end{array}\right\} \\
&& \left\{\begin{array}{c} v_i\left(t\right) \\ v_j\left(t\right) \\ v_k\left(t\right) \end{array}\right\}
=\left[\begin{array}{ccc}
1 & x_i & y_i \\
1 & x_j & y_j \\
1 & x_k & y_k \end{array}\right]
\left\{\begin{array}{c} b_0\left(t\right) \\ b_1\left(t\right) \\ b_2\left(t\right)
\end{array}\right\}
\end{eqnarray*}
����āC
\begin{eqnarray*}
&& \left\{\begin{array}{c} a_0\left(t\right) \\ a_1\left(t\right) \\ a_2\left(t\right) \end{array}\right\}
=\frac{1}{2\Delta}\left[\begin{array}{ccc}
x_jy_k - x_ky_j & x_ky_i - x_iy_k & x_iy_j - x_jy_i \\
y_j-y_k & y_k - y_i & y_i - y_i \\
x_k - x_j & x_i - x_k & x_j - x_i \end{array}\right]
\left\{\begin{array}{c} u_i\left(t\right) \\ u_j\left(t\right) \\ u_k\left(t\right)
\end{array}\right\}
= \left[\begin{array}{ccc}
a_{jk} & a_{ki} & a_{ij} \\
b_{jk} & b_{ki} & b_{ij} \\
c_{jk} & c_{ki} & c_{ij}\end{array}\right]\left\{\begin{array}{c} u_i\left(t\right) \\ u_j\left(t\right) \\ u_k\left(t\right)
\end{array}\right\} \\
&& \left\{\begin{array}{c} b_0\left(t\right) \\ b_1\left(t\right) \\ b_2\left(t\right) \end{array}\right\}
=\frac{1}{2\Delta}\left[\begin{array}{ccc}
x_jy_k - x_ky_j & x_ky_i - x_iy_k & x_iy_j - x_jy_i \\
y_j-y_k & y_k - y_i & y_i - y_i \\
x_k - x_j & x_i - x_k & x_j - x_i \end{array}\right]
\left\{\begin{array}{c} v_i\left(t\right) \\ v_j\left(t\right) \\ v_k\left(t\right)
\end{array}\right\} = \left[\begin{array}{ccc}
a_{jk} & a_{ki} & a_{ij} \\
b_{jk} & b_{ki} & b_{ij} \\
c_{jk} & c_{ki} & c_{ij}\end{array}\right]\left\{\begin{array}{c} v_i\left(t\right) \\ v_j\left(t\right) \\ v_k\left(t\right)
\end{array}\right\}
\end{eqnarray*}
�����ŁC$\Delta$�́C�O�p�`�v�f�̖ʐςł���C�����ƂȂ�D
\begin{eqnarray*}
2\Delta = \left | \begin{array}{ccc}
1 & x_i & y_i \\
1 & x_j & y_j \\
1 & x_k & y_k
\end{array}\right|
\end{eqnarray*}
�܂��C
\begin{eqnarray*}
\left. \begin{array}{l}
\displaystyle{a_{lm} = \frac{x_ly_m - y_mx_l}{2\Delta}} \\
\displaystyle{b_{lm} = \frac{y_l - y_m}{2\Delta}} \\
\displaystyle{c_{lm} = \frac{x_m-x_l}{2\Delta}}\\
(l, m=i, j, k)
\end{array}\right\}
\end{eqnarray*}
����āC�v�f���C�ӓ_�̕ψʂ́C���̂悤�ɕ\�킷���Ƃ��ł���D
\begin{eqnarray*}
&& u = u\left(x,y,t\right) =
\left\{\begin{array}{ccc}
1 & x & y \end{array}\right\}
\left[\begin{array}{ccc}
a_{jk} & a_{ki} & a_{ij} \\
b_{jk} & b_{ki} & b_{ij} \\
c_{jk} & c_{ki} & c_{ij}
\end{array}\right]
\left\{\begin{array}{c}
u_i\left(t\right) \\ u_j\left(t\right) u_k\left(t\right)
\end{array}\right\} \\
&& v = v\left(x,y,t\right) =
\left\{\begin{array}{ccc}
1 & x & y \end{array}\right\}
\left[\begin{array}{ccc}
a_{jk} & a_{ki} & a_{ij} \\
b_{jk} & b_{ki} & b_{ij} \\
c_{jk} & c_{ki} & c_{ij}
\end{array}\right]
\left\{\begin{array}{c}
v_i\left(t\right) \\ v_j\left(t\right) v_k\left(t\right)
\end{array}\right\}
\end{eqnarray*}
�ψʃx�N�g��$\mathbf{u}$�Ƃ��Ă܂Ƃ߂�ƁC
\begin{eqnarray*}
\mathbf{u} &=&
\left\{\begin{array}{c} u\left(x,y,t\right) \\ v\left(x,y,t\right) \end{array}\right\} =
\left[\begin{array}{cccccc}
1 & 0 & x & 0 & y & 0 \\
0 & 1 & 0 & x & 0 & y \end{array}\right]
\left[\begin{array}{cccccc}
a_{jk} & 0 & a_{ki} & 0 & a_{ij} & 0 \\
0 & a_{jk} & 0 & a_{ki} & 0 & a_{ij} \\
b_{jk} & 0 & b_{ki} & 0 & b_{ij} & 0 \\
0 & b_{jk} & 0 & b_{ki} & 0 & b_{ij} \\
c_{jk} & 0 & c_{ki} & 0 & c_{ij} & 0 \\
0 & c_{jk} & 0 & c_{ki} & 0 & c_{ij}
\end{array}\right]
\left\{\begin{array}{c}
u_i\left(t\right) \\ v_i\left(t\right) \\ u_j\left(t\right) \\ v_j\left(t\right) \\ u_k\left(t\right) \\ v_k\left(t\right)
\end{array}\right\} \\
&=& \mathbf{N}\left(x,y\right)
\left\{\begin{array}{c}
u_i\left(t\right) \\ v_i\left(t\right) \\ u_j\left(t\right) \\ v_j\left(t\right) \\ u_k\left(t\right) \\ v_k\left(t\right)
\end{array}\right\}
\end{eqnarray*}
���ɘc�x�N�g�����v�Z����D�c�����́C
\begin{equation}
\left\{\varepsilon\right\} = \left\{\begin{array}{c}
\varepsilon_x \\ \varepsilon_y \\ \gamma_{xy} \end{array}\right\} = \left\{\begin{array}{c}
\frac{\partial u}{\partial x} \\ \frac{\partial v}{\partial y} \\ \frac{\partial u}{\partial y} + \frac{\partial v}{\partial x}
\end{array}\right\}
\end{equation}
�����ŁC���̊W���������Ă���D
\begin{eqnarray*}
&& \frac{\partial u}{\partial x} = \frac{1}{2\Delta}\left(b_iu_i + b_ju_j + b_mu_m\right) \\
&& \frac{\partial v}{\partial y} = \frac{1}{2\Delta}\left(c_iv_i + v_jv_j + c_mv_m\right) \\
&& \frac{\partial u}{\partial y}+\frac{\partial v}{\partial x} = \frac{1}{2\Delta}\left(c_iu_i + b_iv_i + c_ju_j + b_jv_j + c_mu_m+b_mv_m\right)
\end{eqnarray*}
����āC�c�x�N�g��$\left\{\varepsilon\right\}$�Ɛߓ_�ψʃx�N�g��$\left\{\begin{array}{llllll}u_i & v_i & u_j & v_j & u_m & v_m \end{array}\right\}^T$�Ƃ̊W�͎��̂悤�ɂȂ�D
\begin{equation}
\left\{\varepsilon\right\} = \frac{1}{2\Delta}\left[\begin{array}{cccccc}
b_i & 0 & b_j & 0 & b_m & 0 \\
0 & c_i & 0 & c_j & 0 & c_m \\
c_i & b_i & c_j & b_j & c_m & b_m
\end{array} \right]
\left\{\begin{array}{l}u_i \\ v_i \\ u_j \\ v_j \\ u_m \\ v_m \end{array}\right\}
\equiv \left[\mathbf{B}\right]
\left\{\begin{array}{l}u_i \\ v_i \\ u_j \\ v_j \\ u_m \\ v_m \end{array}\right\}
\end{equation}
���́|�c�W�͎��̂悤�ɕ\���ł���D
\begin{equation}
\left\{\sigma\right\} = \left\{\begin{array}{c}
\sigma_x \\ \sigma_y \\ \tau_{xy}
\end{array} \right\} = \left[\mathbf{D}\right]
\left\{\begin{array}{c}
\varepsilon_x \\ \varepsilon_y \\ \gamma_{xy} \end{array}\right\}
=\left[\mathbf{D}\right]\left\{\varepsilon\right\}
\end{equation}
�����ŁC�����e���̂ɑ��镽�ʉ��͖��i$\sigma_z=0$�j�ł́C
\begin{eqnarray*}
\left[\mathbf{D}\right] = \frac{E}{1-\nu^2}\left[\begin{array}{ccc}
1 & \nu & 0 \\
\nu & 1 & 0 \\
0 & 0 & \frac{1-\nu}{2}
\end{array}\right]
\end{eqnarray*}
�܂��C���ʘc���i$\varepsilon_z=0$�j�ł́C
\begin{eqnarray*}
\left[\mathbf{D}\right] = \frac{E\left(1-\nu\right)}{2\left(1+\nu\right)\left(1-2\nu\right)}
\left[\begin{array}{ccc}
1 & \frac{\nu}{1-\nu} & 0 \\
\frac{\nu}{1-\nu} & 1 & 0 \\
0 & 0 & \frac{1-2\nu}{2\left(1-\nu\right)}
\end{array}\right]
\end{eqnarray*}
����āC�c�G�l���M�[$E_V$�����߂�Ǝ����ƂȂ�D
\begin{eqnarray*}
E_V = \int_V \frac12\left\{\varepsilon\right\}^T\left\{\sigma\right\}dV
= \int_V\frac12\left\{\sigma\right\}^T\left\{\varepsilon\right\}dV
\end{eqnarray*}
�]���āC���ϕ������Ǝ��̂悤�ɂȂ�D
\begin{eqnarray}
\delta E_V &=& \int_V\delta\left\{\varepsilon\right\}^T \left[\mathbf{D}\right]\left\{\varepsilon\right\}dV
= \delta\left\{\begin{array}{llllll}u_i & v_i & u_j & v_j & u_m & v_m \end{array}\right\}
\int_V\left[\mathbf{B}\right]^T\left[\mathbf{D}\right]\left[\mathbf{B}\right]dV
\left\{\begin{array}{l}u_i \\ v_i \\ u_j \\ v_j \\ u_m \\ v_m \end{array}\right\} \nonumber\\
&\equiv& \delta\left\{\begin{array}{llllll}u_i & v_i & u_j & v_j & u_m & v_m \end{array}\right\}
\left[\mathbf{K}\right]
\left\{\begin{array}{l}u_i \\ v_i \\ u_j \\ v_j \\ u_m \\ v_m \end{array}\right\}
\end{eqnarray}
�����ŁC�O�p�`�̐ϕ����l���C��͑Ώۂ̌����iz�����j��$t$�Ƃ���ƁC
\begin{eqnarray*}
\left[\mathbf{K}\right\}=\int_V\left[\mathbf{B}\right]^T\left[\mathbf{D}\right]\left[\mathbf{B}\right]dV
=\left[\mathbf{B}\right]^T\left[\mathbf{D}\right]\left[\mathbf{B}\right]t\Delta
\end{eqnarray*}
�ƂȂ�D����C�^���G�l���M�[$E_T$�́C
\begin{eqnarray*}
E_T = \int_V \frac12\rho\left\{\begin{array}{ll} \dot{u} & \dot{v} \end{array}\right\}
\left\{\begin{array}{l} \dot{u} \\ \dot{v} \end{array}\right\}
\end{eqnarray*}
�]���āC���ϕ����Ƃ�Ǝ��̂悤�ɂȂ�D
\begin{eqnarray}
\delta E_T &=& \int_V \rho\delta\left\{\begin{array}{ll} \dot{u} & \dot{v} \end{array}\right\}
\left\{\begin{array}{l} \dot{u} \\ \dot{v} \end{array}\right\}
=\delta\left\{\begin{array}{llllll}\dot{u}_i & \dot{v}_i & \dot{u}_j & \dot{v}_j & \dot{u}_m & \dot{v}_m \end{array}\right\}\left[\mathbf{N}\right]^T\left[\mathbf{N}\right]
\left\{\begin{array}{l}\dot{u}_i \\ \dot{v}_i \\ \dot{u}_j \\ \dot{v}_j \\ \dot{u}_m \\ \dot{v}_m \end{array}\right\} \nonumber\\
&\equiv& \delta\left\{\begin{array}{llllll}\dot{u}_i & \dot{v}_i & \dot{u}_j & \dot{v}_j & \dot{u}_m & \dot{v}_m \end{array}\right\}
\left[\mathbf{M}\right]
\left\{\begin{array}{l}\dot{u}_i \\ \dot{v}_i \\ \dot{u}_j \\ \dot{v}_j \\ \dot{u}_m \\ \dot{v}_m \end{array}\right\}
\end{eqnarray}
�����ŁC��͑Ώۂ̌����iz�����j��$t$�Ƃ���ƁC
\begin{eqnarray*}
\left[\mathbf{M}\right\}=\int_x\int_y\rho\left[\mathbf{N}\right]^T\left[\mathbf{N}\right]dxdy\cdot t
\end{eqnarray*}
�ƂȂ�D
3.2.2 ���`�Ђ��ݎO�p�`�v�f
�@
�@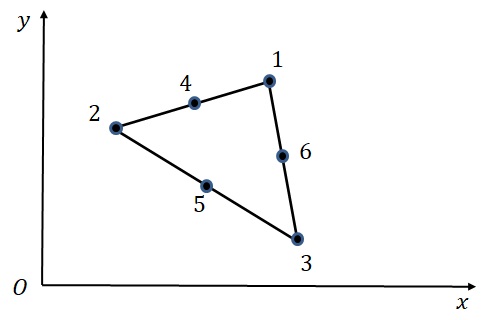
�} 3.3 Finite element of a plane
�@
�����̂Ђ��ݕ��z���l�����邽�߂ɁC�}3.3�Ɏ����悤�Ȓ��_�ƕӂ̒��_�ɐߓ_�����O�p�`�v�f���l����D�ߓ_�ԍ���}�Ɏ����悤�ɁC�����v���ɒ��_�ɂP�C�Q�C�R�C���ɕӂ̒��_�ɂS�C�T�C�U�Ƃ���D��̐ߓ_$i$�ŁC�O�߂̒�Ђ��ݗv�f�Ɠ��l�ɕψʐ���$u_i$��$v_i$�����Ƃ���D���������āC�v�f�̂T�ߓ_�Ɋւ���ψʐ����́C�����̂悤�ɂȂ�D
\begin{eqnarray*}
\left\{\delta\right\}^T = \left\{\begin{array}{ccccccc}
u_1& v_1& u_2 & v_2& \ldots & u_6 & v_6 \end{array}\right \}
\end{eqnarray*}
�v�f�̕ψʏ�����̐ߓ_�ψʂ�p���ĕ\�����邱�ƂɂȂ�̂ŁC�C�ӓ_�̕ψʂ͎����̂悤�ɕ\���ł��邱�ƂɂȂ�D
\begin{eqnarray*}
\left. \begin{array}{l}
u= \alpha_1 + \alpha_2x + \alpha_3y + \alpha_4x^2 + \alpha_5xy + \alpha_6y^2 \\
v= \beta_1 + \beta_2x + \beta_3y + \beta_4x^2 + \beta_5xy + \beta_6y^2 \\
\end{array}\right\}
\end{eqnarray*}
�㎮�Ɍ����12�̖���W��$\alpha_i$�C$\beta_i$$(i=1,2,\ldots,6)$��12�̐ߓ_�ψ�$u_i$�C$v_i$�ŕ\�����邱�ƂɂȂ�D�ȉ��C�`���I�ɍs��\����p���邱�Ƃɂ���D���̐ߓ_�ψʃx�N�g��$\left\{\delta\right\}$�Ɩ���W���x�N�g��$\left\{\alpha\right\}$�̊W�́C�e�ߓ_�ψʂ��㎮�ɑ�����邱�Ƃɂ��C�����̂悤�ɒ�܂�D
\begin{eqnarray*}
\left\{\delta\right\} =\mathbf{H}\left\{\alpha\right\}
\end{eqnarray*}
���̎����t�ɉ����ƁC����W���x�N�g��$\left\{\alpha\right\}$�́C�����̌`�Őߓ_�ψʃx�N�g��$\left\{\delta\right\}$�ƊW�Â��邱�Ƃ��ł���D
\begin{eqnarray*}
\left\{\alpha\right\} =\mathbf{H}^{-1}\left\{\delta\right\}
\end{eqnarray*}
���������āC�ψʏ�͎����ŕ\���邱�ƂɂȂ�D
\begin{eqnarray*}
\left\{\begin{array}{l}
u \\ v \end{array}\right\}
&=&\left[ \begin{array}{cc} \mathbf{A} & \mathbf{0} \\
\mathbf{0} & \mathbf{A} \end{array} \right]\mathbf{H}^{-1}\left\{\delta\right\} \\
&=&\mathbf{N}\left\{\delta\right\}
\end{eqnarray*}
�����ŁC$\mathbf{A}$�͎����ƂȂ�D
\begin{eqnarray*}
\mathbf{A}=\left[\begin{array}{cccccc}1&x&y&x^2&xy&y^2\end{array}\right]
\end{eqnarray*}
���̌�́C�O�Ɠ��l�ɏ������s���Ηǂ����ƂɂȂ�D
3.3 ���K���
�@��L�̌`���$\mathbf{N}$�ɂ��K�肳���ߓ_�ψʂƔC�ӓ_�ψʂ̊W���g���āC���ʉ��́C����сC���ʘc�����肵���ꍇ�̎��ʍs��$\mathbf{M}$�ƍ����s��$\mathbf{K}$��莮������D