5.運動と振動制御例
殆んどの機械システムは運動を伴い,起動・停止といった過渡的な挙動や繰り返し動作などは,振動的な挙動を誘発する要因となりえる.そのため,機械システムの制御に際しては,図5-1上図のように,共振周波数よりも低い周波数領域で駆動を行い,振動ができるだけ発生しないような動かし方が行われてきた.即ち,機械システムに存在する共振特性が現れない領域で制御を行い,対象を剛体あるいは質点として,位置制御などは通常のPID制御などで駆動するというものである.この場合は,対象の剛性が高く変形しないなどの条件が必要である.しかしながら,世の中の要請として,省エネ化,省資源化の為に,軽量化を進める,ということは避けられないため,剛性の低下も同時に避けられない課題となる.さらに,作業効率や作業時間の短縮などの要求なども同時にあり,作業動作の高速化,すなわち,高周波数領域での駆動実現といった要求は必ず起こる.即ち,図5-1下図のように,機械システムを駆動するための運動制御と振動制御の周波数領域がぶつかり,これらを同時に実現することが必要となる.第3章で数値実験した”自動車発進時の挙動”でも見られたように運動を始めると同時に振動が発生するような場合には,振動を抑えながら駆動を行う,という課題をクリアする必要がある.
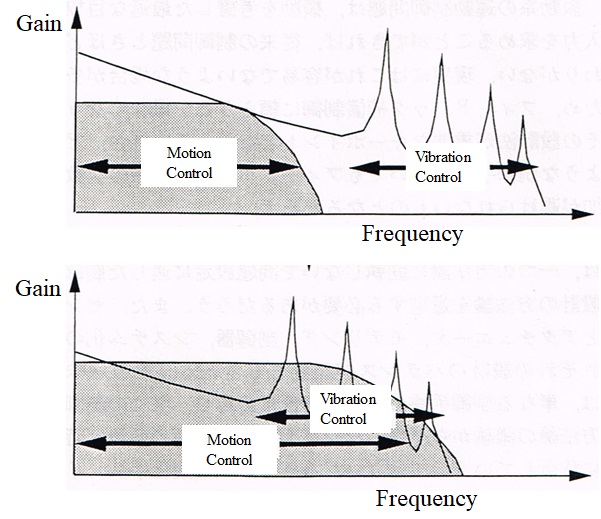
図5-1 周波数領域での運動と振動の制御のイメージ
ここでは,図5-2に示す系を用いて,自動車発進時に車体に発生する上下振動とピッチング振動を抑える振動制御を加え,発進時の自動車の挙動改善の可能性について調べる.ここで,図に示すように車体の回転角速度および上下振動加速度など制御に必要な値は対応するセンサを用いて,実時間で計測できるとする(実際に容易に実現できる).
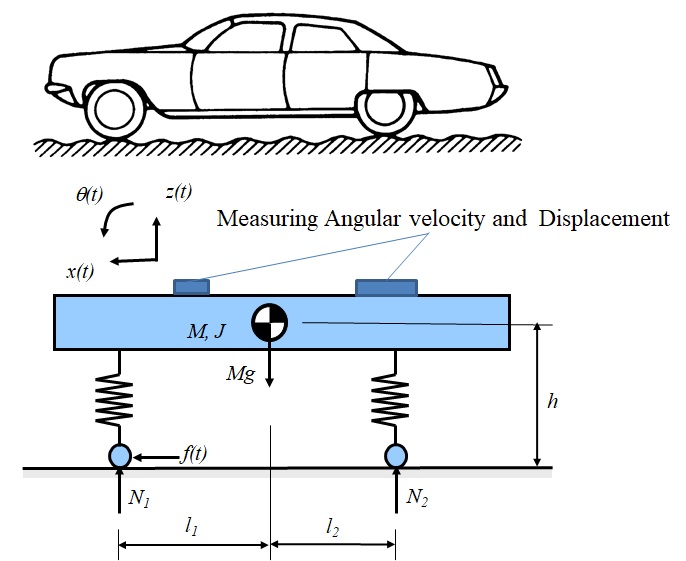
図5-2 自動車走行モデル
5.1 スカイフックダンパー
一般の車両では図5-3(a)のようにタイヤ―車体間にサスペンションとショックアブソーバーを設け,車体振動を吸収するようなPassive制御系となっている.Passive制御では一般に効果的な周波数帯域に制限があるため,必要の応じて,Active制御を行い,必要に応じて制御性能を上げることが行われることがある.陸上走行する車両の上下方向の振動を制御する効果的な考え方として,図5-3(b)に示すようなスカイフックダンパーという考え方がある.これ車上に実際は存在しない天井を設け,そこから車両自体にダシュポットを設置したような効果を上げる制御方法で,実際には図5-3(c)に示すようなタイヤ―車両間にアクチュエーターを設置し,スカイフックダンパーの効果を実現するという制振方法である.図5-3(a)と(b)のモデルに対して運動方程式を適用し,スカイフックダンパーの利点を考えてみると良い.
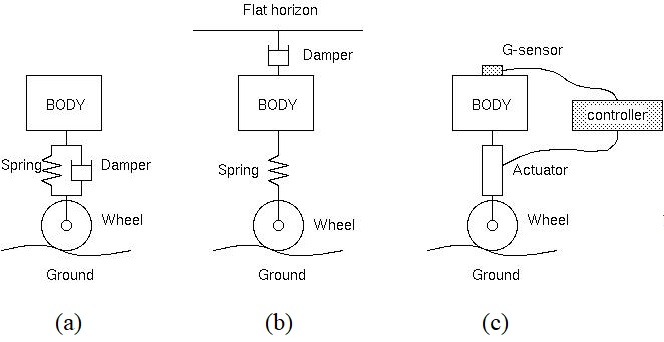
図5-3 自動車上下方向振動の制振
第3章で数値実験したモデルに対してスカイフックダンパー用アクチュエーターを配置したイメージを図5-4に示す.アクチュエーターはサスペンションと平行に設置されており,サスペンションによるばね力に付加される形で入力が加わる.スカイフックダンパーは,絶対速度に比例した力を発生させることになるので,前輪後輪部の上下方向の絶対速度を計測あるいは推定する必要がある.例えば,重心位置の速度$v$と重心回りの回転(反時計回りを正とする)角速度$\omega$が計測できれば,前後輪タイヤ部の速度はそれぞれ
\begin{eqnarray*}
v_1 = v-l_1\omega \\
v_2 = v+l_2\omega
\end{eqnarray*}
と評価し,アクチュエーターの発生力を
\begin{eqnarray*}
f_{sh1} = c_{sh}\left(v-l_1\omega\right)\\
f_{sh2} = c_{sh}\left(v+l_2\omega\right)
\end{eqnarray*}
とすれば良いことになる.
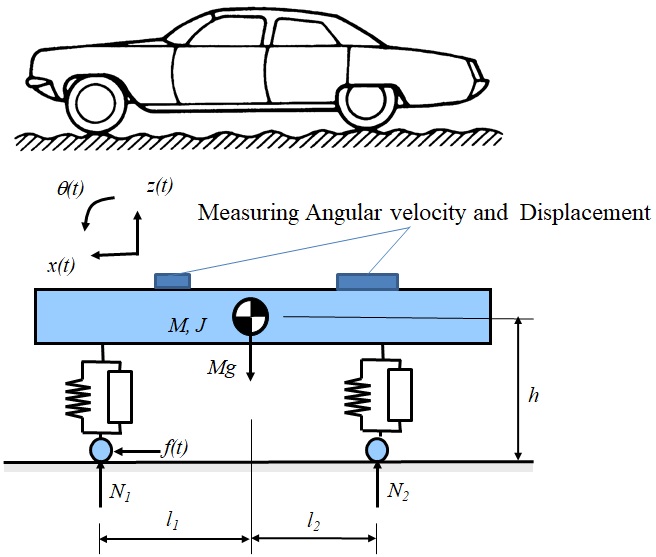
図5-4 スカイフックダンパーによる自動車上下方向振動の制振
5.2 演習
実際にプログラムを作成し,結果について考察せよ.