�V�D���i�^���Ɖ�]�^���������ɋN����n�̃��f��
7.1 �V��N���[�����f��
�@�@�B�V�X�e���̓��I�ȓ���ɂ����āC�P�Ȃ�ړ��i���i�^���j�C�x�_���̉�]�^���ȂǓ��I������P�̂Ƃ��Ď�荇�����Ƃ�������ۂ����������݂���D�����ł́C�V��N���[���̃��f���̈�ł���C���������Ɉړ��\�Ȉړ���ԂɌ��˂��ꂽ���̐U��q�n�ɑ���^���������o���C�V�X�e���̓��I�����ɂ��Ē��ׂĂ݂�D
�@�ΏۂƂ���ړ����-�U��q�n���f����}7-1�Ɏ����D
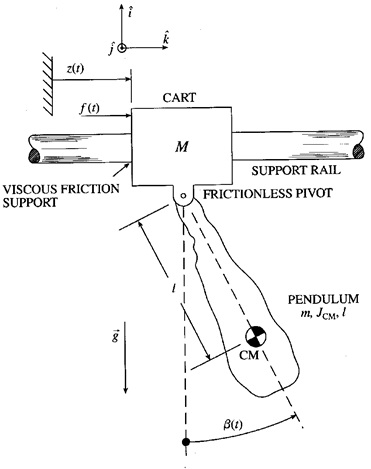
�}7-1�@�ړ���ԁ]�U��q�n���f��
���f�����ɍۂ��āC�}7-2�Ɏ������ڂ����肷��D�����ŁC�p�����[�^�Ƃ��Ē�߂��Ă��Ȃ��ړ���ԂƑ��s���[���Ԃ̔S�������W���́C$D$�Ƃ���D

�}7-2�@���f�����ɂ���������ݒ�
7.2�@�^���������̓��o
�}7-1�Ɏ����悤�ɐ��������ψ�$z(t)$�̒P�ʃx�N�g����$\mathbf{k}$�C����������̒P�ʃx�N�g����$\mathbf{i}$�Ƃ���C�����̒P�ʃx�N�g���Ɓh�E��n�h��g�ނ悤�Ɏ��ʏ�����𐳂Ƃ���P�ʃx�N�g��$\mathbf{j}$�����D�ړ���ԁi�d�S�j�x�N�g��$\mathbf{r}_c$�́C
\begin{eqnarray*}
\mathbf{r}_c = z(t)\mathbf{k}
\end{eqnarray*}
�ƕ\���ł���̂ŁC���x�x�N�g��$\mathbf{v}_c$�͎��̂悤�ɂȂ�D
\begin{eqnarray*}
\mathbf{v}_c = \dot{z}(t)\mathbf{k}
\end{eqnarray*}
�܂��C����ɘA������Ă���U��q�d�S�ʒu�x�N�g����
\begin{eqnarray*}
\mathbf{r}_G = z(t)\mathbf{k} + l\sin\beta(t)\mathbf{k} - l\cos\beta(t)\mathbf{i}
\end{eqnarray*}
�ƂȂ�̂ŁC���x�x�N�g���͎����ƂȂ�D
\begin{eqnarray*}
\mathbf{v}_G = \dot{z}(t)\mathbf{k} + l\dot{\beta}(t)\cos\beta(t)\mathbf{k} + l\dot{\beta}(t)\sin\beta(t)\mathbf{i}
= \left\{\dot{z}(t) + l\dot{\beta}(t)\cos\beta(t)\right\}\mathbf{k} + l\dot{\beta}(t)\sin\beta(t)\mathbf{i}
\end{eqnarray*}
����C���̌n�ɑ���Free-body Diagram���l����Ɛ}7-3�̂悤�ɂȂ�D
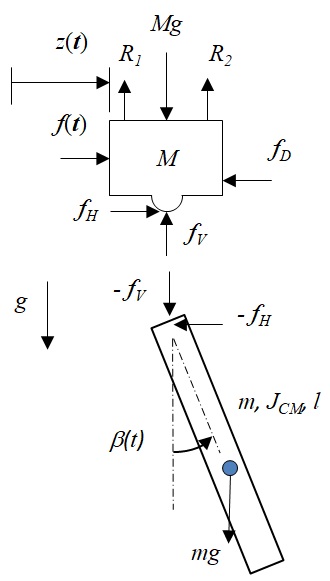
�}7-3�@�ړ���ԁ]�U��q�n
�}7-3�ɂ����ĉ��肵���e�͂��x�N�g���ŕ\�킷�D�ړ���Ԃ͑傫���������Ă���悤�ɕ`���Ă��邪�C���ۂɂ͍�p�͂͏d�S�ɍ�p���邱�Ƃ����肵�Ă��肻�̗̓x�N�g��$\mathbf{f}_c$��
\begin{eqnarray*}
\mathbf{f}_c = \left\{f(t) + F_H - F_D\right\}\mathbf{k} + \left(R_1+R_2+F_V-Mg\right)\mathbf{i}
\end{eqnarray*}
�U��q�̍�p����͂́C��p�_��������C�A���ʒu�ɂ�����
\begin{eqnarray*}
\mathbf{f}_p = -F_H\mathbf{k} -F_V\mathbf{i}
\end{eqnarray*}
�d�S�ʒu��
\begin{eqnarray*}
\mathbf{f}_G = -mg\mathbf{i}
\end{eqnarray*}
�ƂȂ�D�d�S�ʒu�ɑ���A���ʒu�̑��Έʒu�x�N�g��$\mathbf{r}_{Gp}$��
\begin{eqnarray*}
\mathbf{r}_{Gp} = \mathbf{r}_c- \mathbf{r}_G = -l\sin\beta(t)\mathbf{k} + l\cos\beta(t)\mathbf{i}
\end{eqnarray*}
�ƂȂ�̂ŁC�U��q�̏d�S���ɍ�p���Ă��郂�[�����g$\mathbf{M}_G$�͎����ƂȂ�D
\begin{eqnarray*}
\mathbf{M}_G &=& \mathbf{r}_c\times\mathbf{f}_p = \left\{-l\sin\beta(t)\mathbf{k} + l\cos\beta(t)\mathbf{i}\right\}\times\left\{-F_H\mathbf{k} -F_V\mathbf{i}\right\} \\
&=& F_Hl\cos\beta(t)+F_Vl\sin\beta(t)\mathbf{j}
\end{eqnarray*}
�e�^���ɑ��āCNewton�̑�Q�@����K�p����D�ړ���Ԃɂ��ẮC
\begin{eqnarray*}
&& \frac{d}{dt}\left(M\mathbf{v}_c\right) = \mathbf{f}_c \\ \\
&& \therefore M\ddot{z}(t)\mathbf{k} = \left\{f(t) + F_H - F_D\right\}\mathbf{k} + \left(R_1+R_2+F_V-Mg\right)\mathbf{i}
\end{eqnarray*}
��Ԃ̈ړ����l����̂ŁC���̉^������������܂�D
\begin{eqnarray*}
M\ddot{z}(t)�@= f(t) + F_H - F_D
\end{eqnarray*}
���̐U�q�̕��i�^���Ɋւ��ẮC
\begin{eqnarray*}
\frac{d}{dt}\left(m\mathbf{v}_p\right) = \mathbf{f}_p + \mathbf{f}_G
\end{eqnarray*}
�����
\begin{eqnarray*}
m\left[\left\{\ddot{z}(t) + l\ddot{\beta}(t)\cos\beta(t)-l\dot{\beta}(t)^2\sin\beta(t) \right\}\mathbf{k} + \left\{l\ddot{\beta}(t)\sin\beta(t)+l\dot{\beta}(t)^2\cos\beta(t)\right\}\mathbf{i}\right] = -F_H\mathbf{k} -F_V\mathbf{i}-mg\mathbf{i}
\end{eqnarray*}
����āC$F_H$�C$F_V$�͎����ƂȂ�D
\begin{eqnarray*}
&& F_H = -m\left\{\ddot{z}(t) + l\ddot{\beta}(t)\cos\beta(t)-l\dot{\beta}(t)^2\sin\beta(t) \right\} \\
&& F_V = -mg -m\left\{l\ddot{\beta}(t)\sin\beta(t)+l\dot{\beta}(t)^2\cos\beta(t)\right\}
\end{eqnarray*}
�܂��C$F_D$��
\begin{eqnarray*}
F_D = -D\dot{z}(t)
\end{eqnarray*}
�ƂȂ�̂ŁC$F_H$�C$F_D$���ړ���Ԃ̉^���������ɑ�������
\begin{eqnarray*}
M\ddot{z}(t) = f(t) -m\left\{\ddot{z}(t) + l\ddot{\beta}(t)\cos\beta(t)-l\dot{\beta}(t)^2\sin\beta(t) \right\} - D\dot{z}(t)
\end{eqnarray*}
�܂��C�U��q�̏d�S���̉�]�^���Ɋւ��Ď��������藧�D
\begin{eqnarray*}
\frac{d}{dt}\left(J_{CM}\dot{\beta}(t)\right)\mathbf{j} = \mathbf{M}_G = F_Hl\cos\beta(t)+F_Vl\sin\beta(t)\mathbf{j}
\end{eqnarray*}
$F_H$�C$F_V$��������Ǝ����ƂȂ�D
\begin{eqnarray*}
J_{CM}\ddot{\beta}(t) = -m\left\{\ddot{z}(t) + l\ddot{\beta}(t)\cos\beta(t)-l\dot{\beta}(t)^2\sin\beta(t) \right\}l\cos\beta(t)-\left[mg+m\left\{l\ddot{\beta}(t)\sin\beta(t)+l\dot{\beta}(t)^2\cos\beta(t)\right\} \right]l\sin\beta(t)
\end{eqnarray*}
�]���āC���̌n�̉^���������͎��̂悤�ɂȂ�D
\begin{eqnarray*}
&& \left(M+m\right)\ddot{z}(t) + D\dot{z}(t)+ ml\left\{\ddot{\beta}(t)\cos\beta(t)-\dot{\beta}(t)^2\sin\beta(t) \right\} = f(t) \\
&& \left(J_{CM}+ml^2\right)\ddot{\beta}(t) + m\ddot{z}(t)l\cos\beta(t) + mgl\sin\beta(t)=0
\end{eqnarray*}
���̌n�́C����$f(t)$�ɂ���ċ쓮�����̂ŁC���̗͂ɂ��l�X�ȋ������������ƂɂȂ�D
7.3 ���K
��苗���쓮���鐔�l�������s���C���������ɉ����Ĕ�������n�̋����ɂ��čl�@����D