4.機械力学・振動工学について
4.1 振動の世界
今更確認する必要も無いと思われるが,
振動:状態が一意に定まらず揺れ動く事象
であり,心拍,呼吸,脳波などの生体信号は,”振動”現象であり,波そのものや波の満ち引き,天体運動なども自然界で見受けられる”振動”現象である.人工的にも振動は様々な場年で現れる,例えば,巷でよく見かける物体(機械)の”運動中”の加速度を測定すると図4-1のような波形が観察される.横軸は単位を秒としている時間で,縦軸が対応する時間における加速度データで,物体の前側の加速度応答が図(a)で,後ろ側が図(b)であり,一定ではないが,加速度の大きさは時間と共に符号も正負変化しながら大きくなったり.小さくなったりして,”状態が一意に定まらない”,即ち,振動が発生している(と見なされる).
【QUIZ 1】これはどんな物体のどんな状態の加速度データと思うか?
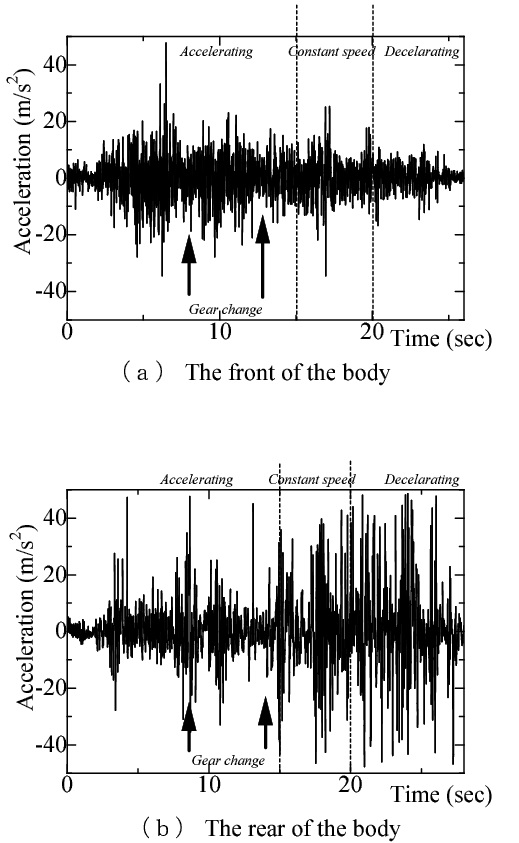
図4-1 加速度の時刻歴応答の例
ここでは,加速度データを測定しているが,これを積分すると速度データになり,更にもう一回積分すると変位となり,変位,速度も加速度同様,状態が一意に定まらず,揺れ動く事象,即ち,振動現象が観察される.他の運動(運転)する機械も同様で,動く機械には,必ず”振動”が発生する.したがって,そこで起こっている”振動”現象をきちんと理解し,設計に反映させるだけでなく,運転(運動)時に起こり得る”振動”に対処可能にしておく必要がある.
”振動”に関する研究として,紀元前580年頃のピタグラスの音階を上げることができる.図4-2に示すように,張力を調整(調律)した弦を使って,現在の音階の基礎となるピタゴラス音階を作成したが,恐るべきことに,”一オクターブ音階が上がると振動数が2倍になる”という”ルール”がその中に含まれており,最終的には,音階は,”等比級数”として振動数が定まるものとなっている.
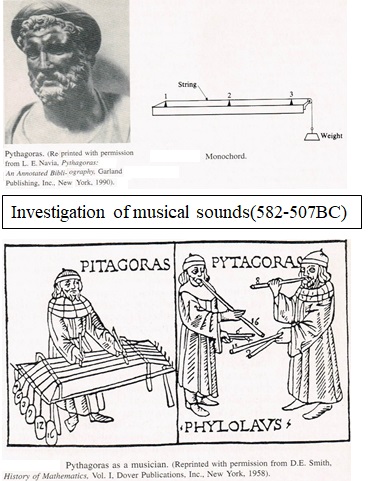
図4-2 音楽における音に関する研究
振り子の等時性発見:1580年頃 ガリレオ
4.2 単振子の振動
単振子の運動方程式は次の通りである.
\begin{eqnarray*}
\ddot{\theta} + \frac{g}{l}\sin\theta = 0
\end{eqnarray*}
仮定:微小振動($\theta$は非常に小さい.$\theta\ll 1$と表記)
$\sin\theta$をTaylor展開すると,
\begin{eqnarray*}
f\left(\theta\right)=\sin\theta = f\left(0\right)+\frac{f'\left(0\right)}{1!}\theta + \frac{f''\left(0\right)}{2!}\theta^2 + \frac{f'''\left(0\right)}{3!}\theta^3 + \ldots = \theta -\frac{1}{6}\theta^3 + \ldots
\end{eqnarray*}
$\theta\ll 1$とすると,$\sin\theta \simeq \theta$として良いので,運動方程式は次式となる.
\begin{eqnarray*}
\ddot{\theta} + \frac{g}{l}\theta = 0
\end{eqnarray*}
$\theta=\theta_0\sin\omega t$とおいてみると,
\begin{eqnarray*}
\ddot{\theta} = -\omega^2\theta_0\sin\theta
\end{eqnarray*}
となるので,運動方程式に代入すると分かるように,
\begin{eqnarray*}
\omega^2=\frac{g}{l}
\end{eqnarray*}
とすると,運動方程式を満たす解(の一つ)となる.
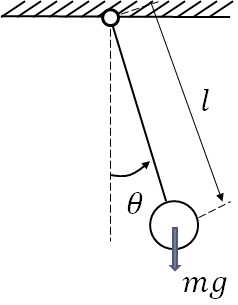
図4-3 単振子の運動
ここで,$\omega=\pm\sqrt{\frac{g}{l}}$は,単振子の長さを定めると値が定まる(ことはよく知っているはずである).
【Quiz 2】$l=0.32$mの単振子の$\omega$を計算せよ.
【Quiz 3】$l=0.32$mの単振子の$\omega$を実験により測定せよ.
解として,仮定した$\theta=\theta_0\sin\sqrt{\frac{g}{l}}t$を元に,単振子の時間に対する角度変化(時刻歴応答)は図4-4のようになる.
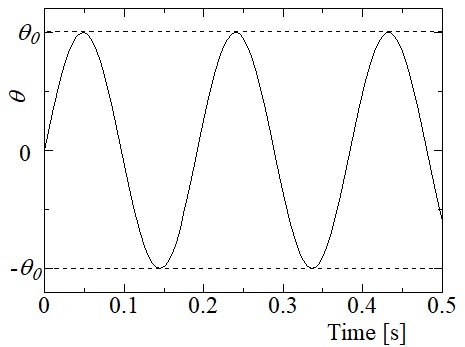
図4-4 単振子角変位の時間的な変化
運動(振動)時に定義できる時間的な変化を表す量:
\begin{eqnarray*}
\begin{array}{lll}
\omega=\sqrt{\frac{g}{l}} &\text{:角振動数}& \text{[rad/s]} \\
f=\frac{1}{2\pi}\omega=\frac{1}{2\pi}\sqrt{\frac{g}{l}} & \text{:振動数} & \text{[Hz]}\\
T=\frac{1}{f}=2\pi\sqrt{\frac{l}{g}} & \text{:周期} & \text{[s]}
\end{array}
\end{eqnarray*}
4.3 振動の数学表現
機械システムの動作には,回転運動,往復運動など繰り返されるものが含まれており,基本的な挙動は振動的である.また,地震,風などの自然環境による外乱や路面走行に伴う応答もまた振動的な挙動を誘発する.これらの振動的な現象を知るうえで重要な因子として,振動現象における”周期性”である.そのため,振動現象は一般に,周期関数により,数学的に表現される.一般的に用いられる周期関数は,「ある振幅で,ある基準に対して,周期的に変化する量」を表現する正弦,余弦関数である.余弦関数で表現すると例えば次式のようになる.
\begin{eqnarray*}
x=x\left(t\right) = A\cos\left(\omega t+\phi\right)
\end{eqnarray*}
あるいは,
\begin{eqnarray*}
x=C\cos\omega t + D\sin\omega t=\sqrt{C^2+D^2}\cos\left(\omega t+\phi\right) = A\cos\left(\omega t+\phi\right)
\end{eqnarray*}
から分かるように,
\begin{eqnarray*}
\begin{array}{lll}
A=\sqrt{C^2+D^2} & \text{:振幅(Amplitude)} & \text{単位長さ[m]} \\
\phi = - \tan^{-1}\frac{D}{C} & \text{:位相(Phase)} & \text{単位[rad]} \\
\omega & \text{:角振動数} & \text{単位[rad/s]} \\
& \text{:角周波数(Angular frequency)} & \\
T=\frac{2\pi}{\omega} & \text{:周期(Period)} & \text{単位[s]} \\
f=\frac{1}{T}=\frac{\omega}{2\pi} & \text{:振動数} & \text{単位[Hz]} \\
& \text{:周波数(frequency)} &
\end{array}
\end{eqnarray*}
であり,周期,振動数で表現すると,次のようになる.
\begin{eqnarray*}
x = A\cos\left(\omega t+\phi\right) = A\cos\left(\frac{2\pi}{T}t + \phi\right)= A\cos\left(2\pi ft+\phi\right)
\end{eqnarray*}
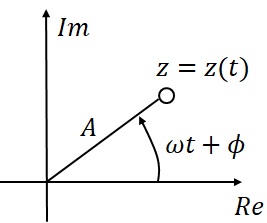
複素数を用いた複素表示による表現もある.図4-5(a)は,横軸が実軸(Re),縦軸が虚軸(Im)とした複素平面を表しており,原点からの距離$A$を振幅として,実軸となす角度を$\omega t+\phi$と取ると,振動はこの複素平面内で回転する量として定義できる.この場合は,
\begin{eqnarray*}
z=z\left(t\right) = x\left(t\right) + iy\left(t\right) =A\cos\left(\omega g+\phi\right)+iA\sin\left(\omega t+\phi\right) = Ae^{i\left(\omega t+\phi\right)}
\end{eqnarray*}
などの表現となり,
\begin{eqnarray*}
&& \dot{z} = i\omega Ae^{i\left(\omega t+\phi\right)}=i\omega z \\
&& \ddot{z} = -\omega^2 Ae^{i\left(\omega t+\phi\right)}=-\omega^2 z
\end{eqnarray*}
となるので,次式となる.
\begin{eqnarray*}
\ddot{z} + \omega^2 z=0
\end{eqnarray*}
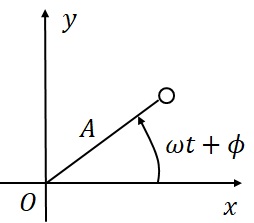
図4-5(b)は,実際に物理的な$xy$平面内を点Oを中心に回転している状態を示しており,この場合の$\omega$は,回転角速度となる.回転角速度の単位としては,rpm[revolution per minutes],cps[cycle per second]等があり,後者はHzと同じ単位となる.
(a) (b)
図4-5 複素表示と回転運動の表現
以上は,振幅,振動数,位相の組み合わせとして,一組のみを考えているが,周期$T$が定義できる”周期関数”的な変動する応答であれば,フーリエ級数(Fourie Transform)を用いて表すことができる.定義は,
\begin{eqnarray*}
&& x=x\left(t\right)=a_0 +\sum_{b=1}^{\infty}\left(a_n\cos\frac{2\pi n}{T}t + b_n\sin\frac{2\pi n}{T}t\right)\\
&& a_0=\frac{1}{T}\int_0^Tx\left(t\right)dt\text{, }a_n=\frac{2}{T}\int_0^Tx\left(t\right)\cos\frac{2\pi n}{T}tdt\text{, } b_n=\frac{2}{T}\int_0^Tx\left(t\right)\sin\frac{2\pi n}{T}tdt
\end{eqnarray*}
$\omega=\frac{2\pi}{T}$を用いて表すと,
\begin{eqnarray*}
x=x\left(t\right)=a_0 +\sum_{b=1}^{\infty}\left(a_n\cos\omega t + b_n\sin\omega t\right)
\end{eqnarray*}
であり,$\omega$は,基本角周波数と言われる.フーリエ級数の意味としては,元々の波形を周期$T$で決まる基本周波数$\frac{1}{T}$あるいは基本角周波数$\frac{2\pi}{T}$の単純な整数倍の振動数を持つ,余弦関数と正弦関数の重ね合わせで表すということであり,周期で決まる時間内に,一定となる$n=0$の振幅,一回振動する$n=1$の振幅,...,$N$回振動する$n=N$の振幅というように,基本周波数の$n$倍の振幅と位相が定まることになることから,周波数解析方法の一種,と考えることもできる.
4.4 機械システムに発生する振動に関連する力
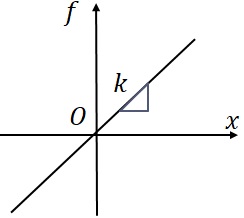
物体に力が加わると変形を起こす.そのため,物体の機械的性質を把握するために,引張試験などの材料試験を行い,応力-歪曲線を求め,事前に変形挙動を把握するということが行われる.変形が弾性的な挙動を示す範囲内では,一般にヤング率を定めることができるので,力と変位の関係を図4-6(a)に示すようなフックの法則で考えることができる.振動的な現象を調べる場合,図4-6(b)に示すように,ばね定数$k$のばねが繋がれた質量$m$が運動する系としてモデル化される.
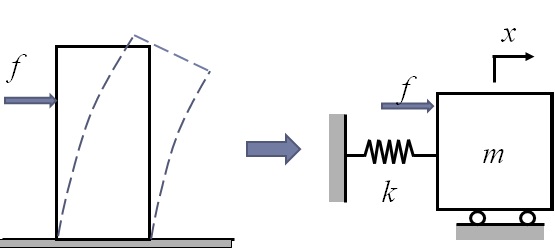
(a) (b)
図4-6 弾性変形のモデル化
ここで,フックの法則は,ばねに力$f$を加えたときのばねの伸びを$x$とするとき,物体の特性で決まる”ばね定数”$k$を使って次のような関係が成り立つという考え方である.
\begin{eqnarray*}
f=kx
\end{eqnarray*}
機械力学では,ニュートンの第2法則やこのフックの法則が成り立つことを前提に運動方程式を求める.
4.5 演習
(1) 自動車のエンジン内のピストンは単調和運動をする.中央の位置から測った振動の振幅は,$\pm 5$cm,ピストンの質量は$2$kgであるとして,自動車のエンジンが$3600$回転/分で作動しているときのピストンの最大の速さおよび加速度を求めよ.
(2)
(a) The position of a vibrating system is
\begin{eqnarray*}
x=\frac{1}{\sqrt{2}}\sin\omega t - \frac{1}{\sqrt{2}}\cos\omega t \text{ [m]}
\end{eqnarray*}
(b) Determine the amplitude $A$ of the vibration and the angle $\phi$ in degrees.
(c) Draw a sketch of $x$ for the value of $\omega t$ from zero to $4\pi$ radians, showing the angle $\phi$.
(3) ある物体が台上で台に対して$x_1=0.95\sin18t$の振動をしている.その台が床に対してまた$x_2=1.00\sin19t$の振動をしている.床上に立って物体を見ればその運動はどのように見えるか.